Andreas Gawron
und Robert Tyrakowski

GPSL
Die GPS unterstützte Landung

 Proceed to the English
Proceed to the English
 version !
version !
 eingesehen
werden. (
eingesehen
werden. (  3,6 MByte )
3,6 MByte ) zu finden.
zu finden.
(Klick auf
zur entsprechend
nächsten Seite ! )
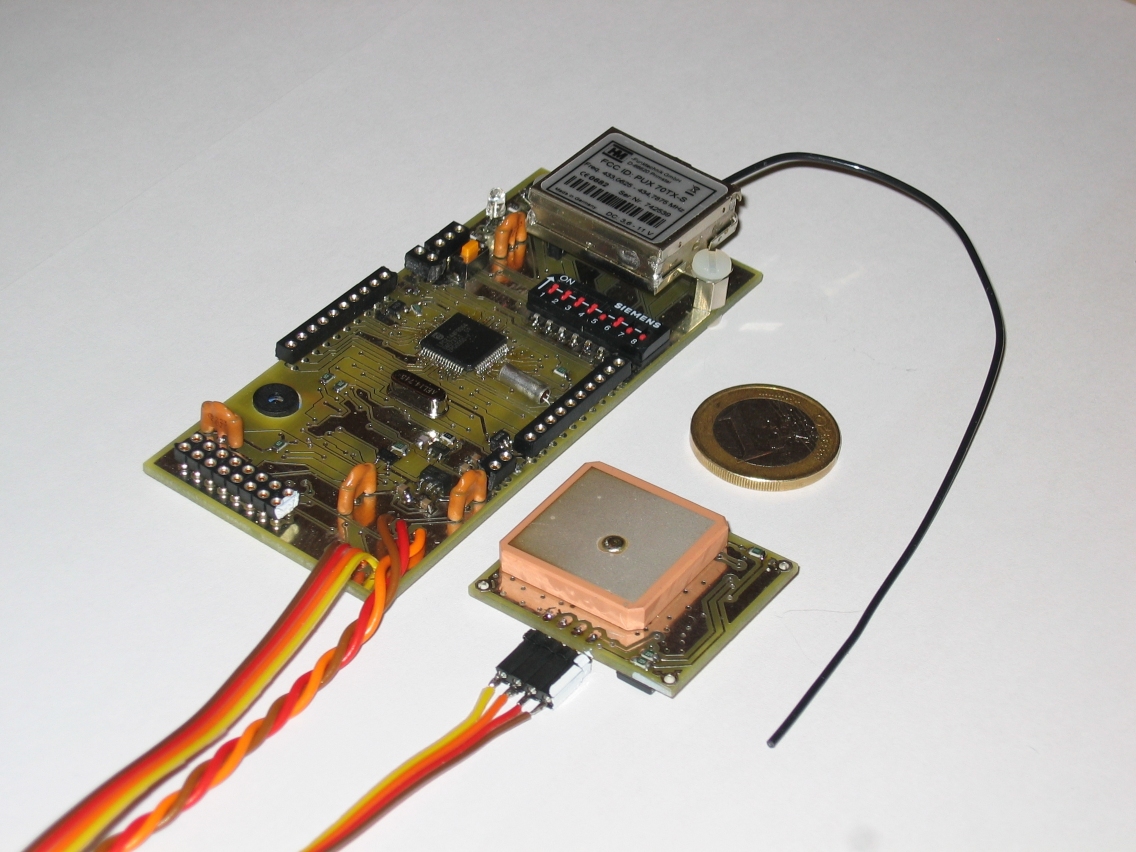
Abmessungen PCB
Mikrocontroller 100 mm x 45 mm x 13 mm GPS Empfänger 32 mm x 34 mm x 9 mm Gewicht 60 Gramm Funkkanal LPD Kanäle 1...69 433 MHz Band Sendeleistung 10 mW (CEPT konform) Leistungsaufnahme Betriebsspannung 3,5 – 7,6 Volt Stromaufnahme
GPSL Mode:
Sleep : ca. 15 mA (GPS in FixNow Mode, Haupt CPU Powerdown)
Betrieb: ca. 140 mA (GPS on, CPU on, 433MHz Tx on)
Variometer Mode:
Betrieb: ca. 80 mA (GPS in FixNow Mode, CPU on, 433MHz Tx on)
Info Channel Mode:
Betrieb: ca. 80 mA (GPS in FixNow Mode, CPU on, 433MHz Tx on)
Betrieb: ca. 140 mA (GPS on, CPU on, 433MHz Tx on) (Notfall Modus)
Besonderheiten Falls die Variometerfunktion von GPSL selbst nicht benutzt werden soll , kann GPSL zusammen mit einem externen Variometer (z.B. Picolario) über einen einzigen Fernsteuerkanal geschaltet und auf dem gleichen LPD Kanal betrieben werden.
Urheberrechte
Wir weisen ausdrücklich drauf hin, dass jedliche gewerbliche Nutzung diese Idee, sowie die Art der Realisierung, als ganzes oder in Teilen , der ausdrücklichen schriftlichen Erlaubnis der Autoren bedarf !
Haftungsauschluss
Die Entwicklung der GPSL HW und SW wurde nach bestem Wissen und Gewissen durchgeführt. Dennoch ist es möglich, dass Fehler im Betrieb auftreten. Der Betreiber eines GPSL Systems benutzt es auf eigene Gefahr und eigenes Risiko. Eine Haftung für eventuelle Schäden und Folgeschäden an Personen und Gütern, schließen die Autoren kategorisch aus.