Last
update: 26. June 2008
|
GPSL
GPS aided landing system for RC
model aircrafts
|
by
Andreas Gawron and Robert
Tyrakowski
The GPSL system supports
RC pilots during landing of
model aircrafts. The model aircraft carries a GPS receiver and a RF
transmitter for the LPD band. A micro controller manages transmission of an audio signal which informs the pilot about
the distance and moving direction of the current model
position regarding a hypothetical perfect horizontal approach
corridor. The system offers information, how the approach
corridor can be reached very early during landing procedure and how to keep the
model in that corridor. The model must be landed by the pilot
manually anyway. GPSL
is just a landing assistant, but not an autopilot !
An optional speech system is able to provide information about
the direct altitude and distance between the current model position and the air
field. Further features like a variometer and
an information channel deliver information about the
current altitude,
supply voltage and about the distance of the plain and its loaction in case the plain has escaped. Also there is a "Homing" function which helps to guide the plain back home if it's not visibile anymore.
An article called "GPSL
- Die GPS unterstützte Landung" (GPSL
- GPS assited landing) has been published in the German model sport
magazine

Issue 3 / 2008
The article in German
language can be found here  . (
. (  3.6 Mbyte)
3.6 Mbyte)
(with permission by Aufwind)
An additional articel has been published in the RC-Network Magzin in July 2008.
The article in German
language can be found here .
If one would like to get more
information about it in English language , please contact the authors by
e-mail.
|
Features
|
| |
|
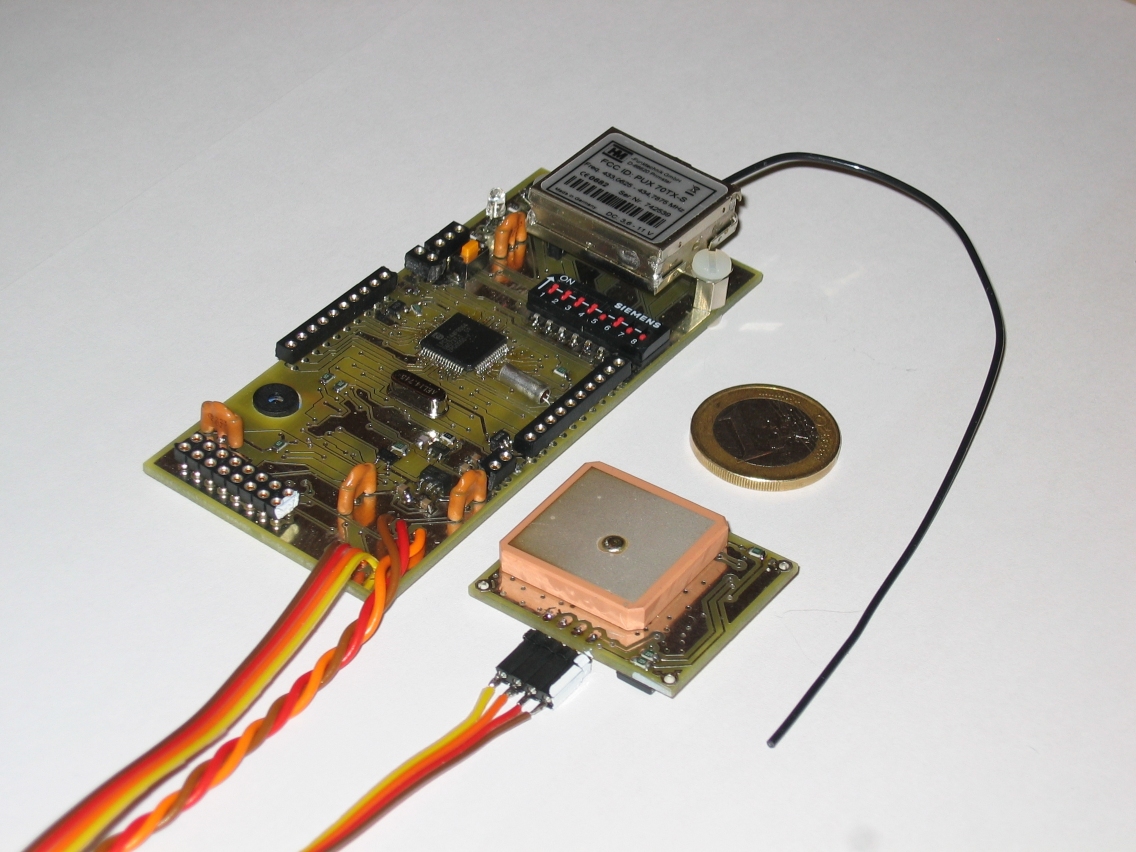
PCB
|
|
| Micro controller size |
100
mm x 45 mm x 13 mm |
| GPS
receiver size |
32 mm x 34 mm x
9 mm |
| Weight |
60 Gram |
| |
|
| RF |
|
| LPD
channels |
1...69
433 MHz Band |
| TX
power |
10 mW
(CEPT conform) |
| |
|
| DC power |
|
| Supply
voltage |
3,5 – 7,6 Volt |
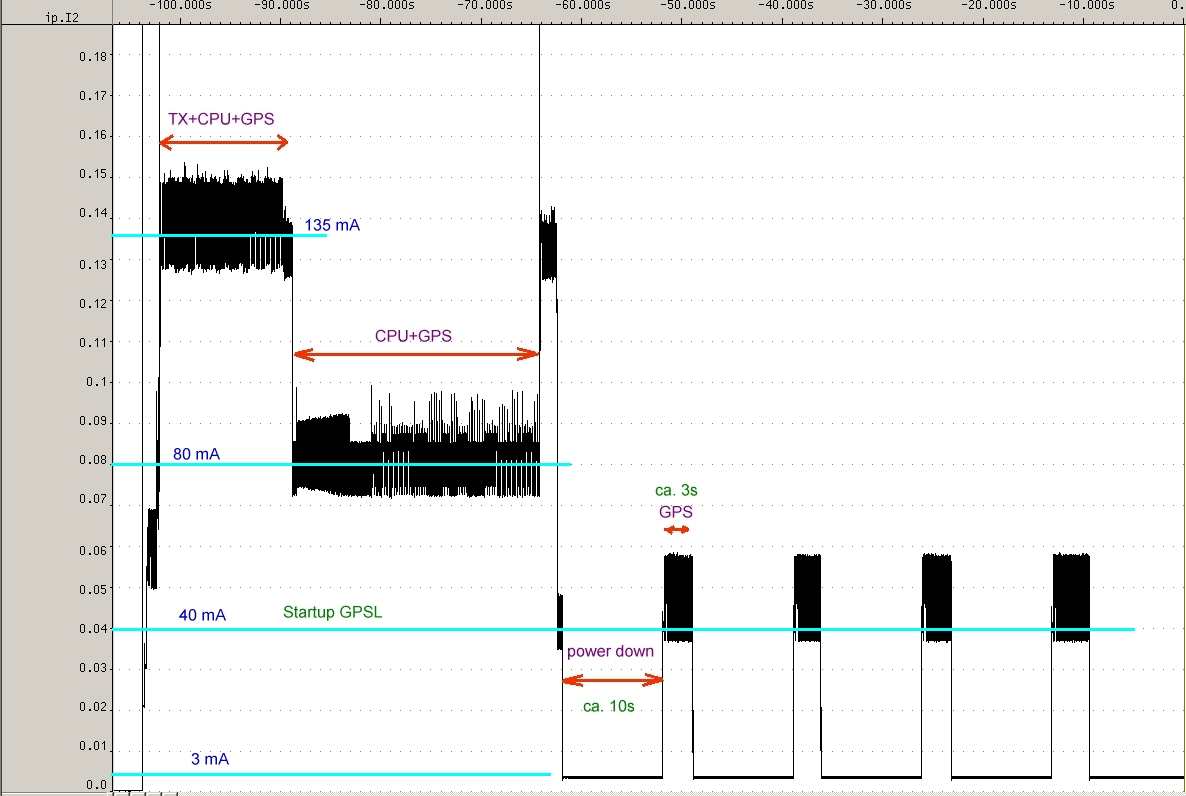
| Supply current |
GPSL Mode:
Sleep : approx.
15 mA
(GPS in FixNow Mode, Main CPU
Powerdown)
Up :
approx. 140 mA
(GPS on, CPU on, 433MHz Tx on)
Variometer Mode:
Up
:
approx..
80 mA
(GPS in FixNow Mode, CPU on, 433MHz
Tx on)
Info Channel Mode:
Up
:
approx.
80 mA
(GPS in FixNow Mode, CPU on, 433MHz
Tx on)
Up
:
approx.
140 mA
(GPSon, CPU on, 433MHz
Tx on) (emergency mode)
|
| |
|
| Special
features |
|
| |
If the variometer and Info-Channel features of GPSL are not needed, the
GPSL system can be used together with an external variometer or a similar
unit on
the same RF channel and with the same shared RC Servo channel . |
| |
|
| Click to the pictures . | Some impressions almost without words |
| |
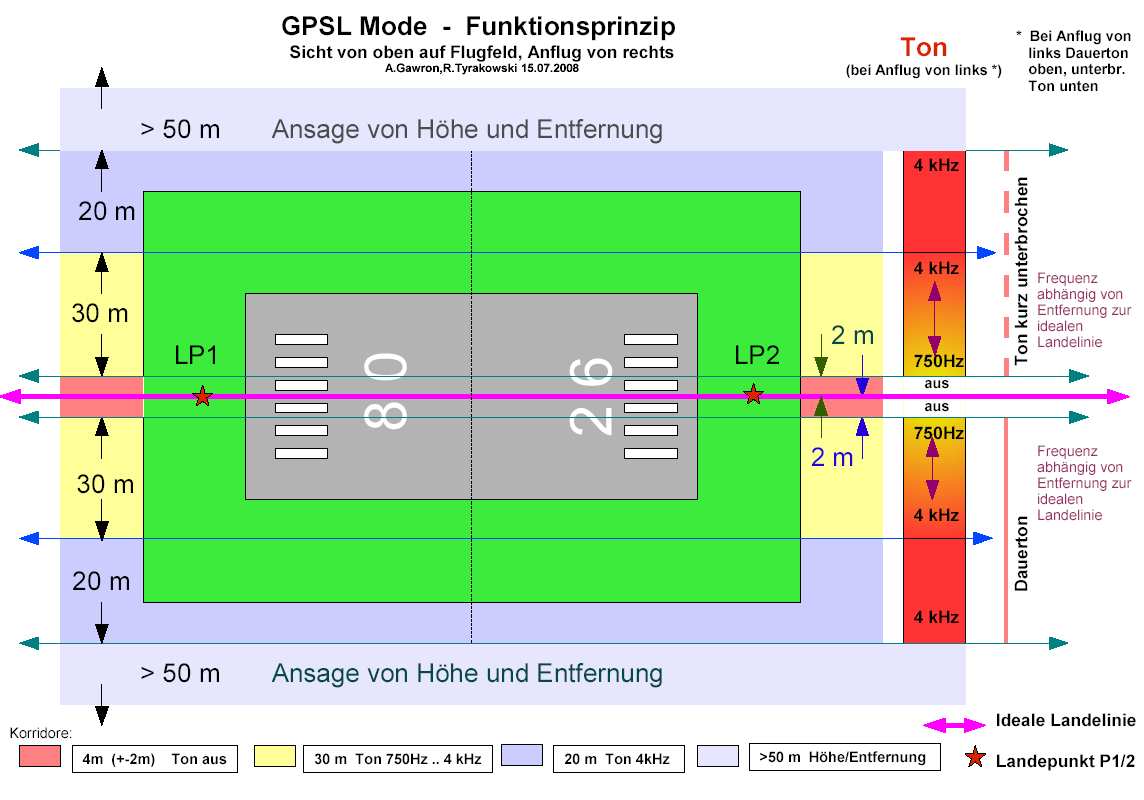
| Illustraction where sound and speech are offered during landing procedure. | 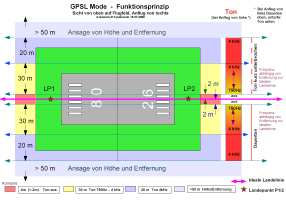 |
| Illustration how landing information are calculated | 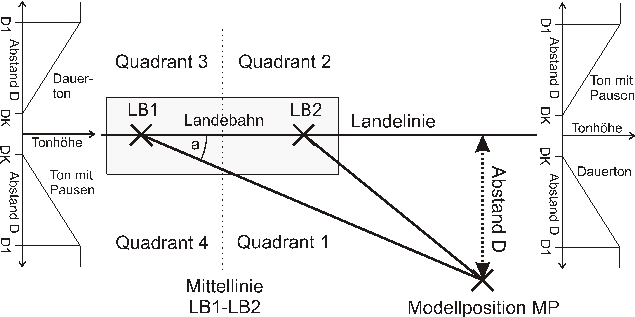 |
| Example of the (optional) display for test purposes. (cell phone display is used) |
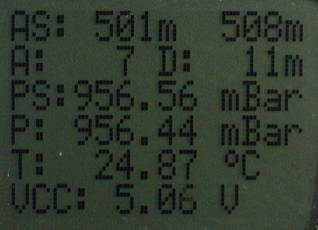  |
| Display unit |
 |
| Power consumption in different opperation phases | 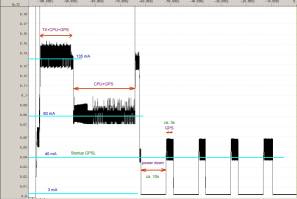 |
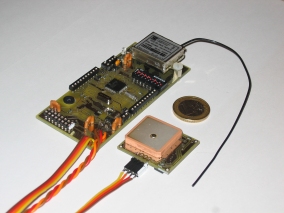
| New hardware , version 3 |  |
| View to GPSL in a 4 m glider |   |
You
may not understand the description, but there there are a lot of
further stuff which gives you a more detailed information about
the GPSL system. |
Copyright
We
would like to point out, that any commercial use of this idea and the
manner of the
realization, completely or as parts, is not permitted.
It is just allowed, if one got the
written permission of the
authors !
Disclaimer
The
GPSL HW and SW was designed in the best of one's knowledge.
Nevertheless, possible errors may happen during
operation . The user of GPSL use it on his own risk. We are not
responsible for damage of goods or harm of persons. We categorically exclude any liability !