| Short description of the features |
The system is based on a 89C51ED2 Microcontroller |
|
|
- |
Computation of position (without PC) of moon,sun,Cygnus,Sagittarius,Cassiopeia,Taurus,Leo and Aquarius |
Demo - Version of the controller system
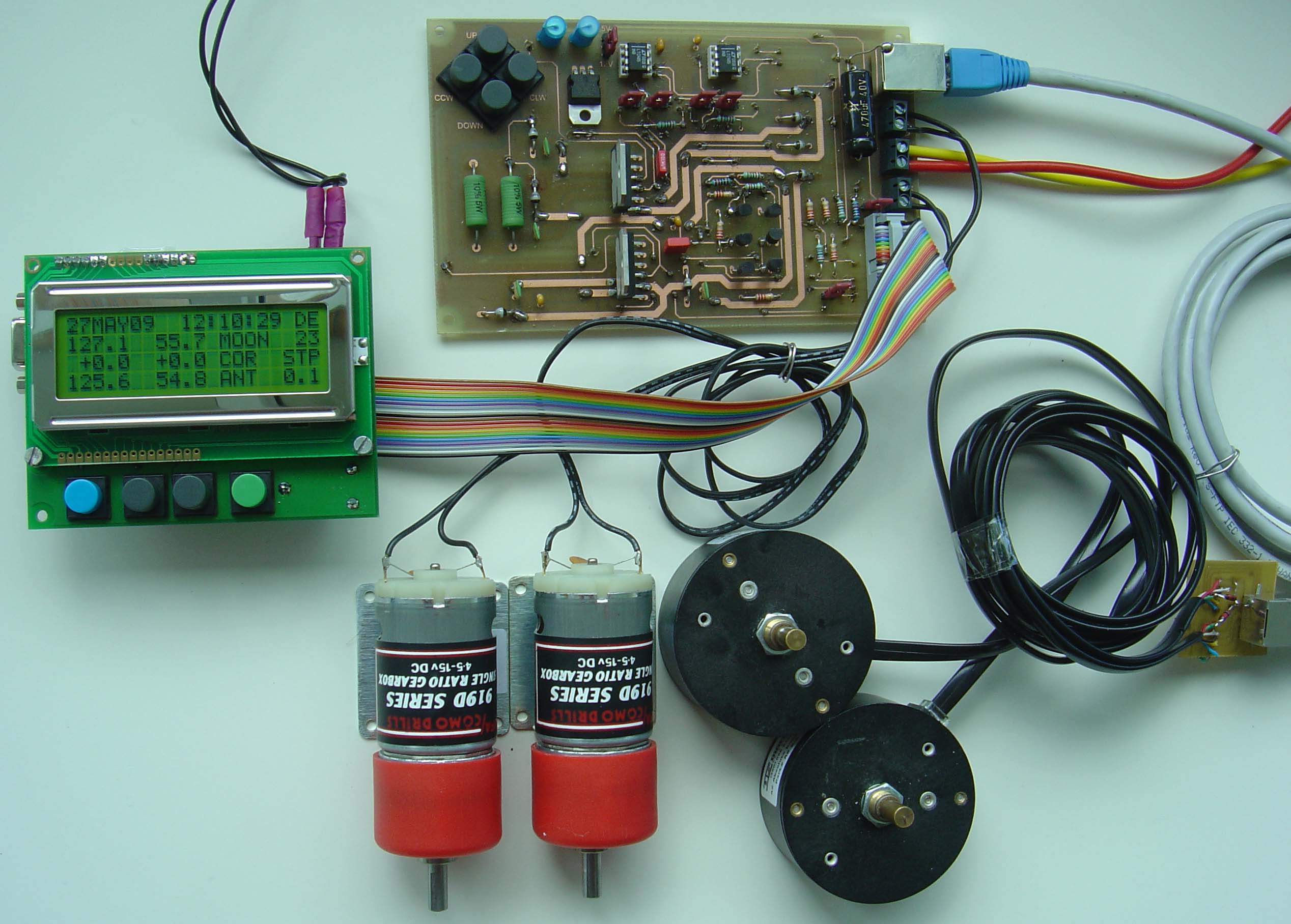
Georg Hylinski (DF1SR) offers different encoders which work in my system: HH12: 12 Bit, 0.1deg resolution, fully compatible with MAB25/ETS25 from Megatron. HH12-INC: Inclinometer, electrically same as HH12, look at: HH12-INC datasheet HH16: 16 Bit, but only 12 Bit used in my system. You need firmware V81 for using it. For prices ask Georg: DF1SR(at)gmx(dot)de The MAB25 from Megatron is discontinued now and replaced by the mechanically improved ETS25. Electrically it is the same as the MAB25: Sometimes there is an unstable readout when connecting the MAB25 via a low quality cable. See hints for improvement at: AN01.pdf Another (but more expensive) encoder is the A2-S-S from US-Digital: http://www.usdigital.com Although the use of incremental encoders is not recommended, I programmed a 89C52 for converting the pulses to the SSI protocol. Get the firmware for it here: inc_ssi.hex See the circuit diagram in the controller documentation. Andy Talbot, G4NJT, kindly developed hardware and firmware to interface a GPS module to the controller. You can download : description (PDF) , HEX file: GPS firmware and PCB BRD file: GPS interface PCB My azimut and elevation motors both do not need more than 1A for moving my 7.3m dish! But there seem to be some systems around with more powerful motors, maybe for tracking a moon which is moving over the sky very quickly ;-) ON4BCB, has developed a nice modification using more powerful H-bridges which can handle up to 43A!! Look at: H_bridge_mod_ON4BCB |
| - | Azimuth and elevation motor controlling for all targets plus two free choice positions | |
| - | Transmission of antenna position via LAN cable from antenna down to the controller in the shack | |
| - | Interfacing
with different absolute encoders is possible: 10..12bit
ETS25, HH12, HH12-INC (Inclinometer), HH16, MAB25, Posital Inclinometer, A2-S-S |
|
| - | Selectable stepsize for tracking | |
| - | Selectable offset for azimuth and elev. up to +/- 9.9 deg | |
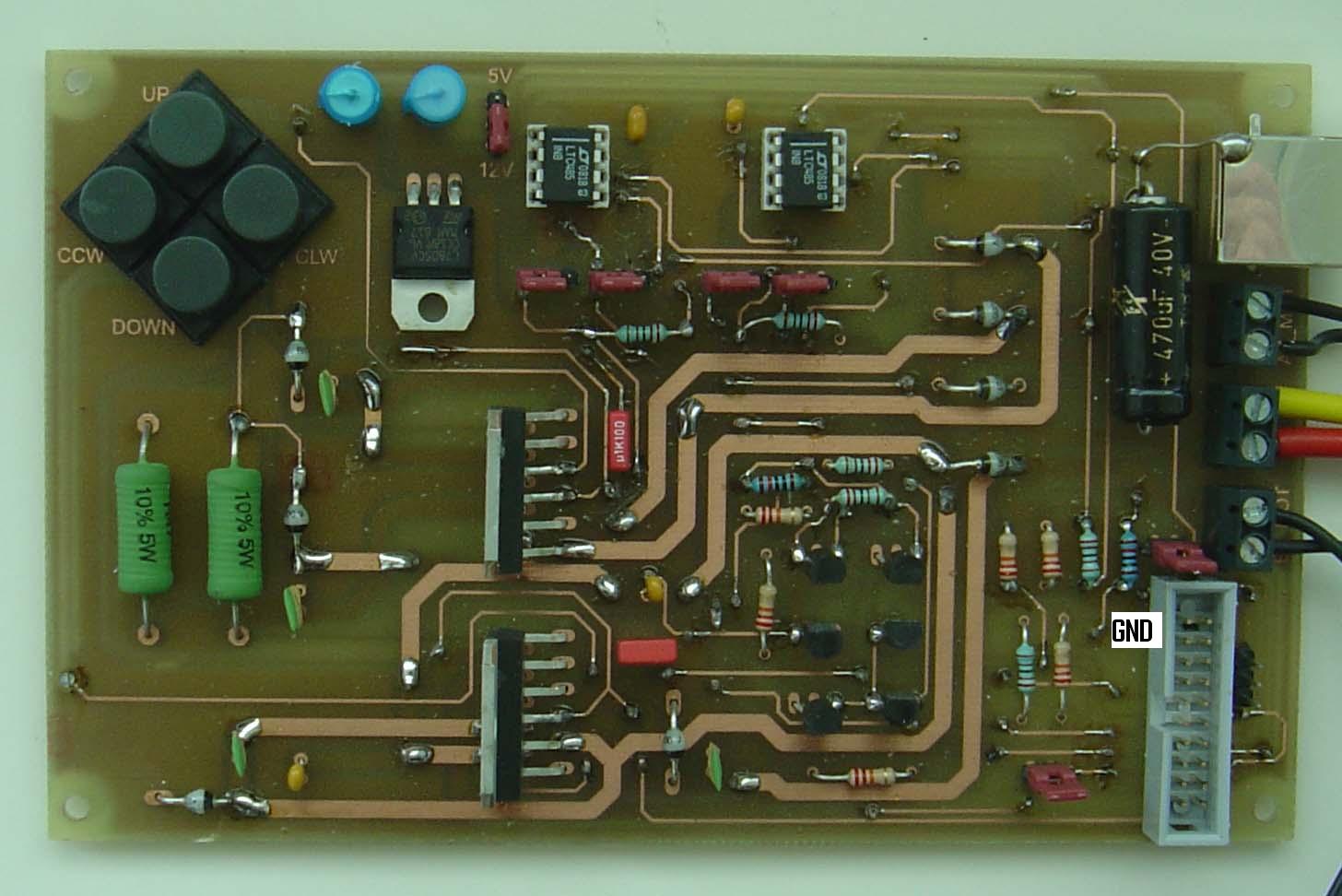
| - | Motor control output clw/ccw up/down, including soft-start and soft-stop | |
| - | Local
operation by 4 buttons at controller, non volatile storage of all
parameters
( remote operation by PC is possible) |
|
| - | Real - Time - Clock | |
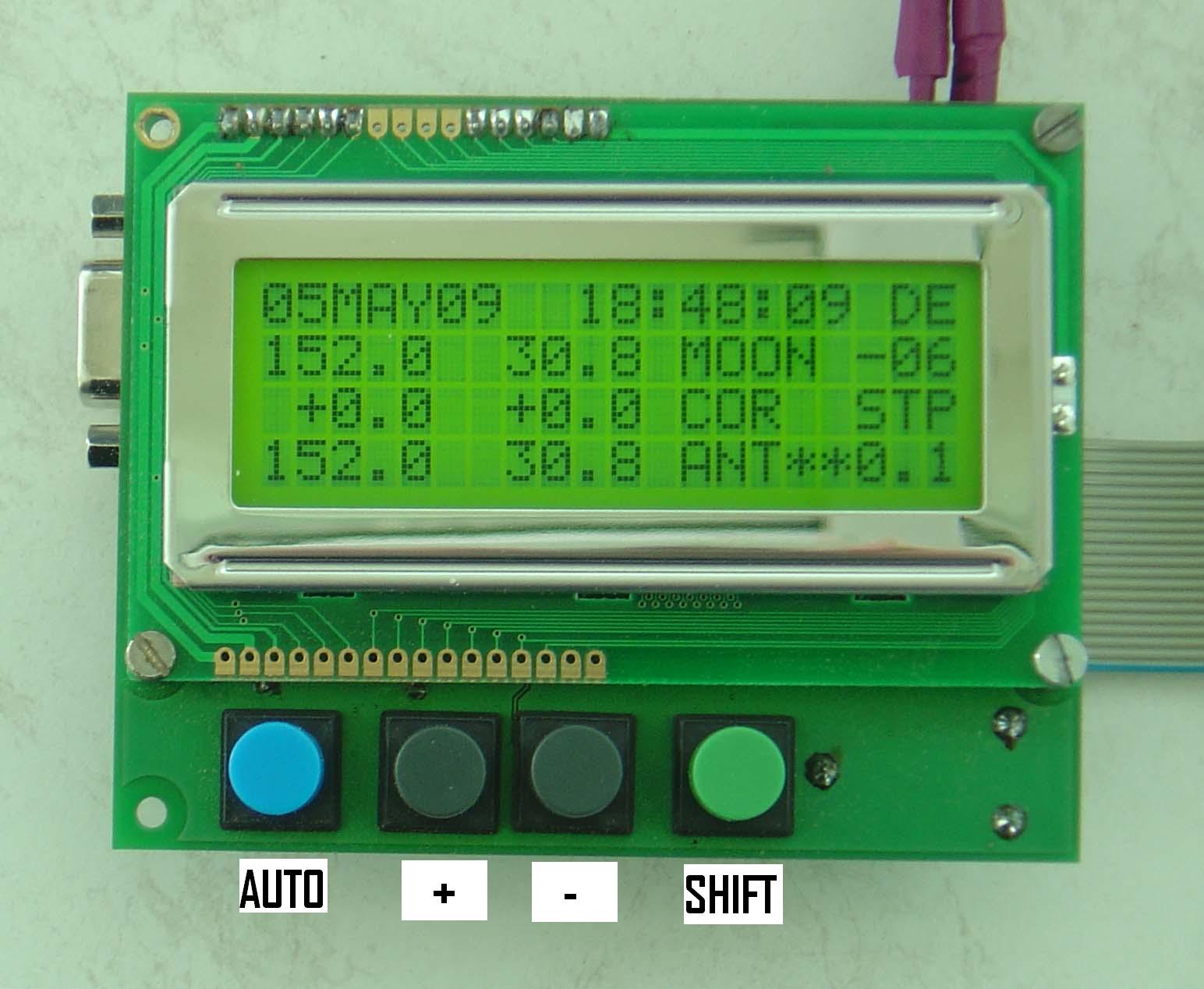
| - | 4 x 20 character LCD - display | |
| Main
advantages:
PC is not necessary for controlling (no interference!), single wire line from antenna (encoders) into shack, ready within a few seconds |
||
|
HEX - FILE FOR CONTROLLER : See a step by step guide how to upload the firmware, written by HB9DRI: AN02.pdf 2ndJuly19: For using the HH16 encoder from DF1SR you need this special firmware. If you are using HH12 or ETS25 stay at firmware published earlier. Although the HH16 provides 16 Bit, only 12 Bit of it are used in my system. The reason is that the CPU (89C51ED2) is at its limit and there is not enough memory inside the chip to extend data length.(manual PWM speed control not included) 19Oct16: Only difference of V7.8 to V7.6 is display of the new Megatron encoder ETS25 instead of MAB25. (manual PWM speed control not included) Only difference of V7.8a to V7.7 is display of the new Megatron encoder ETS25 instead of MAB25.The manual PWM speed control is included, but using this feature, a hardware modification is necessary. See description below! 11Aug15: PWM speedcontrol in manual mode included.For using this feature, a hardware modification is necessary! Idea and description manual_speedcontrol.pdf by ON4BCB 30April15: problem with unstable readout when using the USdigital A2-S-S encoder fixed 22July14: Inclinometer ACS-360-1-S102-VE2-PM (Posital) for elevation, together with MAB25 for azimuth included eme_contr_jfl_v75.hex
22Nov2013: version V74 (my individual solution) 25Aug13: Doppler shift calculation improved for better accuracy eme_contr_jfl_v73.hex 23Nov12: Doppler shift indication for 3.4GHz and 24GHz included, remote commands for antenna offset compensation added 20Oct12: new style of offset compensation included and interference from PWM to encoder reading fixed. Read the additional documentation, written by HB9DRI: AN03.pdf BRD - FILES FOR PCBs : DOCUMENTATION WITH DETAILED DESCRIPTION: AVAILABILITY OF CONTROLLER MODULES / PCBs I will not provide myself PCBs or completely built modules, and HB9DRI stopped producing modules. Walter Crauwels, ON4BCB, has developed a very smart single board solution of my controller system. You can ask him for the BRD file or the PCB together with a programmed chip.on4bcb(at)gmail(dot)com For more information have a look at: OE5JFL_DIY_Schematic.PDF OE5JFL_DIY_toplayer.PDF OE5JFL_DIY_manual.PDF
Alex HB9DRI has written an additional very useful documentation how to test, install and interface the system to the antenna. |
||