
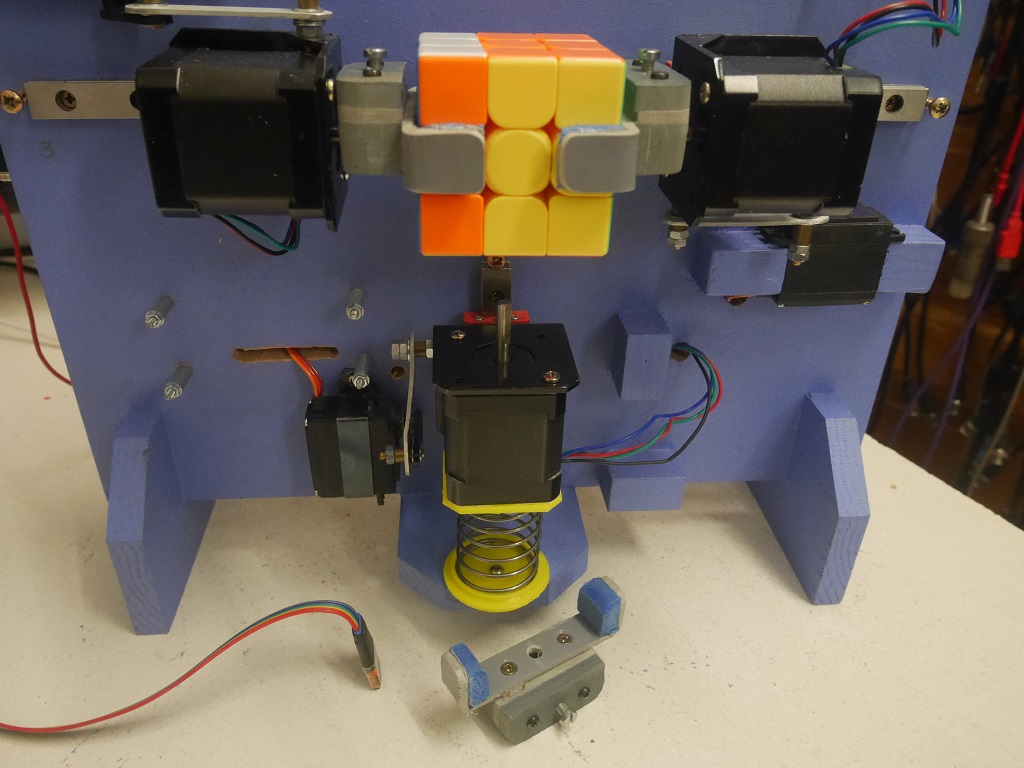
Je travaille sur le projet au long-cours d'un robot capable de résoudre le Rubik's cube, le robot constitué hormis l'unité centrale de trois pinces devra manipuler le cube dans l'espace. La pièce maîtresse d'un tel projet c'est la pince, nécessaire pour manipuler le cube dans l'espace. C'est un vrai challenge, le cube devant être manipulé des dizaines de fois, pris, lâché et repris devra l'être avec une précision extrême.
Comme il faut toujours un commencement la première idée à été de fabriquer ces pinces en bois, puis en plastique PVC, le serrage du cube se faisant par des pads en mousse issue d'un tapis de sport. La première chose à faire c'est de mettre en forme un morceau de tuyau PVC Ø100mm pour en tirer une plaque rectangulaire plate. Après découpe du tronçon nécessaire il est rendu à l'état mou en le chauffant à l'aide d'un pistolet thermique puis aplati entre deux plaques de bois, il y reste plusieurs minutes jusqu'au refroidssement et retour à l'état solide.


J'y ai découpé quelques bandes de 15mm de large qui ont été mises en forme sur un moule en bois construit pour l'occasion.

Ce type de pince est parfaitement fonctionnel, il prends et tient bien le cube, même en rotation, le souci c'est que les pinces continuent à tenir le cube quand elles reculent. Interessant pour d'autres applications robotiques mais pas dans ce cas précis ou il faut des pinces qui s'ouvrent au recul pour lâcher le cube.
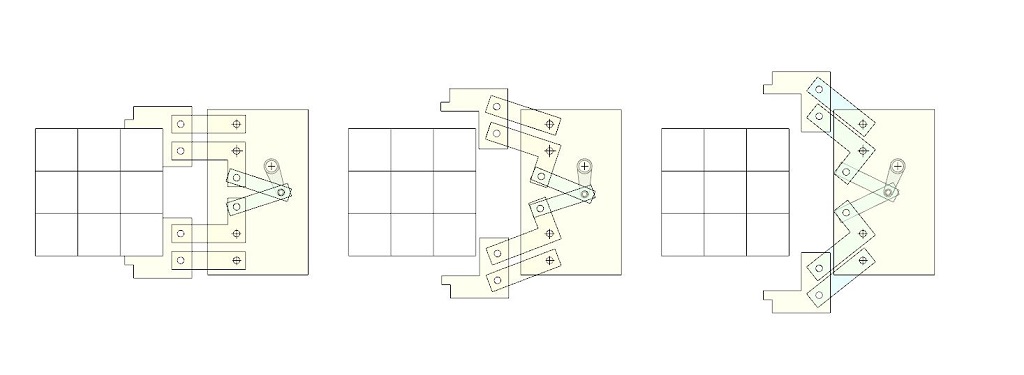
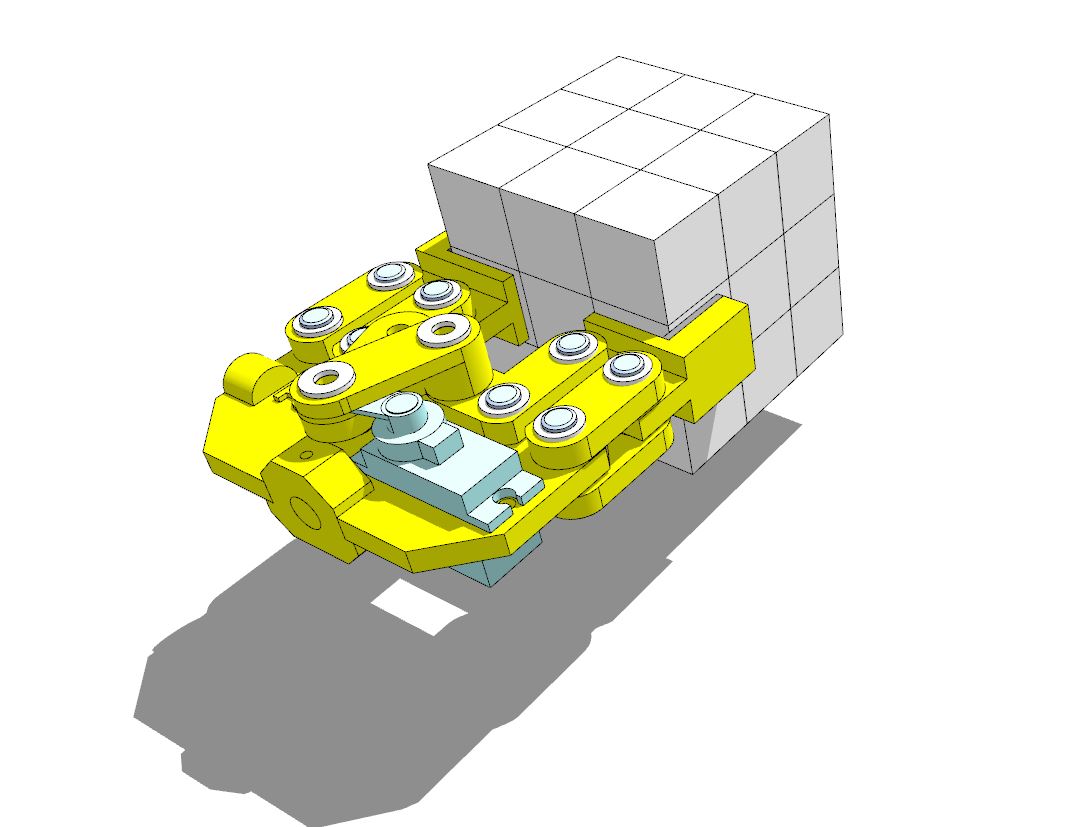
Il faut donc un système de pince capable de saisir et de lâcher, un système articulé et dans mon cas précis adapté à la préhension d'un cube mesurant 59mm de coté mais également avec une légère tolérance en cas de changement de marque et cotes légèrement différentes. L'idéal pour simplifier le système serait une pince avec des mors symétriques et parfaitement parallèles.
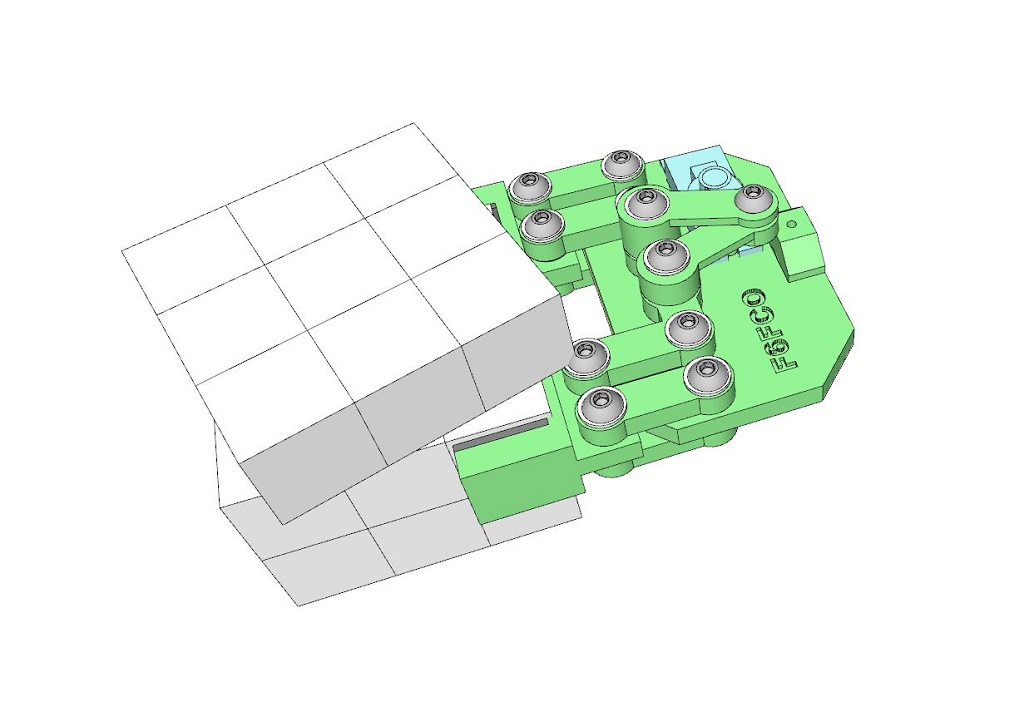
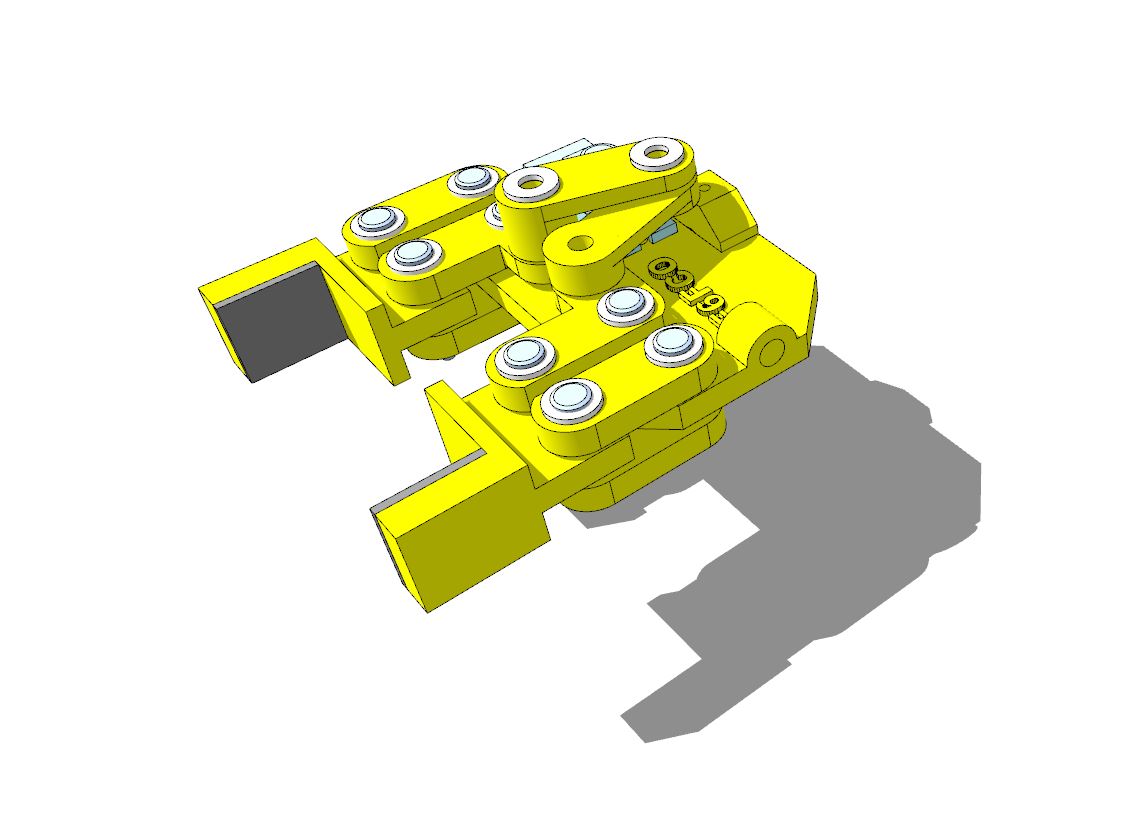
Une petite simulation 3D. L'occasion de faire tourner mon imprimante 3D J34N1N3.
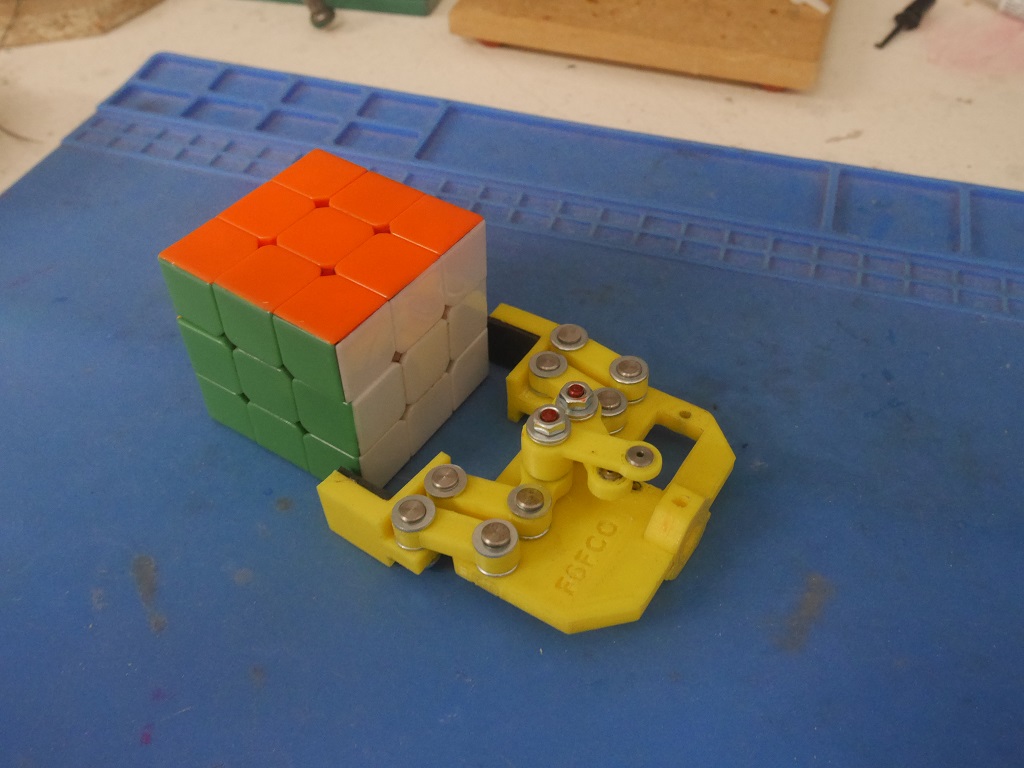
Des pads antidérapants venant d'une chambre à air de VTT sont collés sur les doigts pour améliorer le grip. Elle est équipée d'un petit servomoteur SG90 qui actionnera les mors.
Il y a du mieux et du moins bien, elle saisit bien, lâche bien mais manque de précision dans les mouvement du au jeu important dans tous les éléments, cause les biellettes qui ne sont présentes que sur une seule face. Par ailleurs le petit servomoteur SG90 manque de force pour tenir correctement le cube.
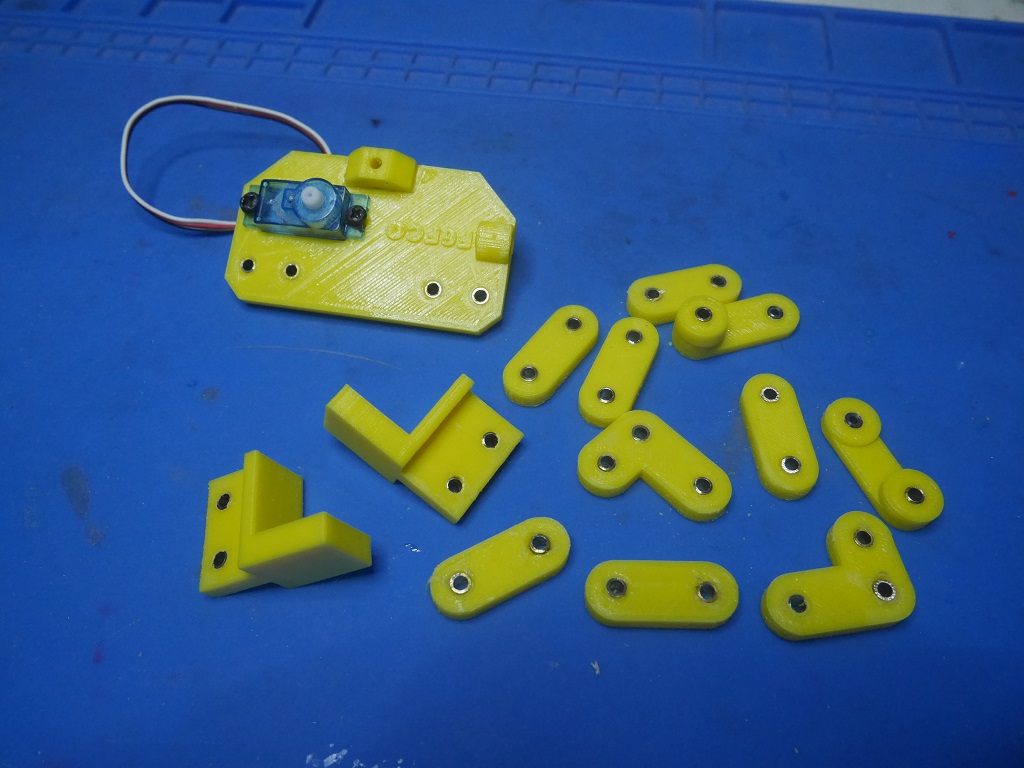
Sur ce modèle j'ai travaillé pour améliorer les liaisons en plaçant des biellettes sur le deux faces ce qui procure une meilleure rigidité à l'ensemble. Les articulations sont améliorées avec des inserts laiton enfoncés à chaud dans le PLA. Optimisation des cotes, le servomoteur SG90 trop faible sera remplacé par un PTK9497 avec un torque de 12kg.
Les articulations sont composées de chemisage Ø3mm placés à chaud avec une presse à inserts pour impression 3D, les axes sont des tiges laiton 3mm, le tout monté avec un jeu minimum.
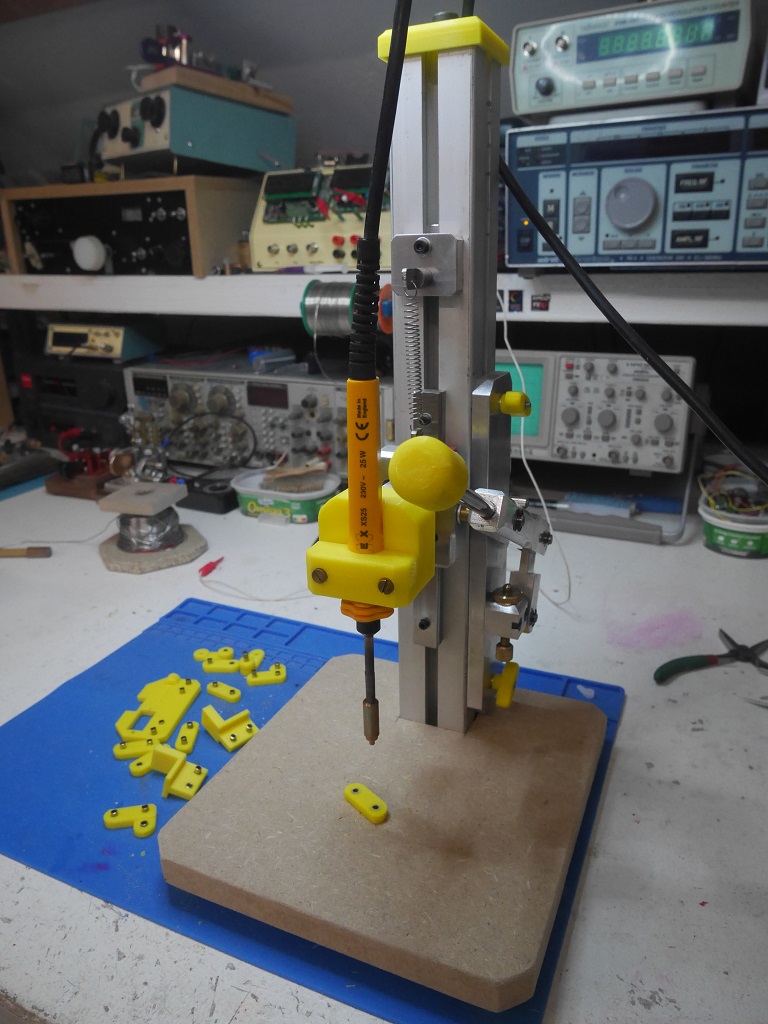
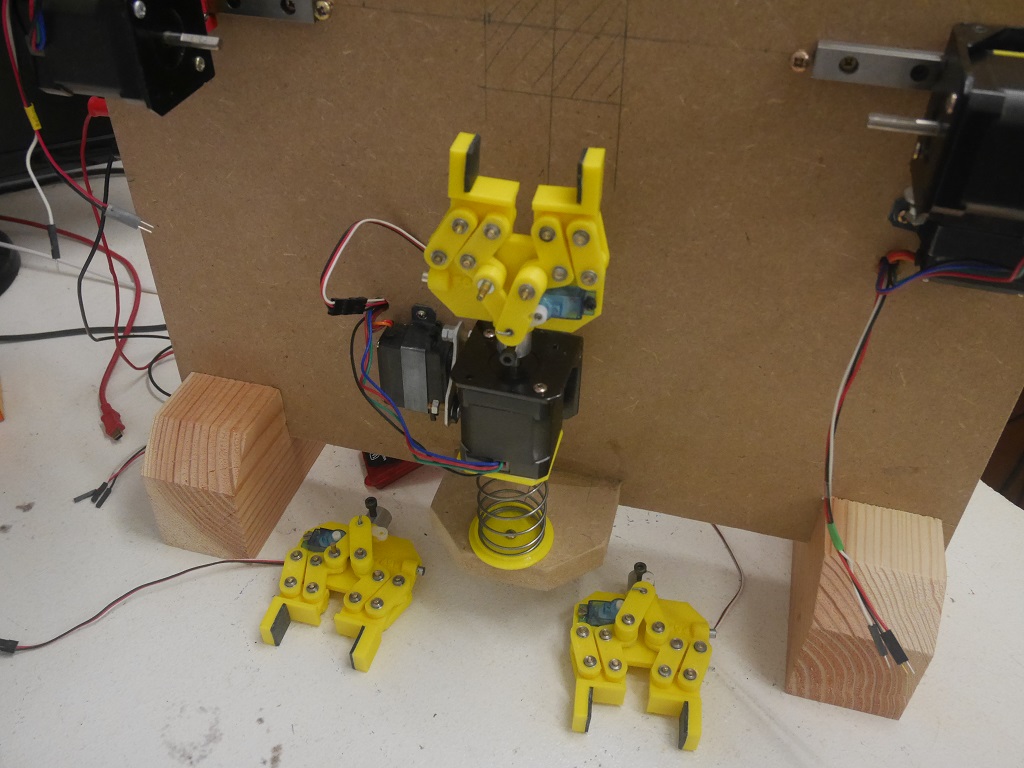
La pince V.3 montée sur le robot.
Le souci avec le système employé c'est le fil à la patte du servo, la nappe tri-fils "signal/Vcc/gnd" s'enroule autour de l'axe du moteur lors des rotations, ce qui pose un problème. La première idée était de gérer cela par le code en créant une variable dédiée qui s'incrémenterait à chaque rotation avant et décrémenterait à chaque rotation arrière. Quand la pince lâcherait le cube et reculerait il suffirait d'effectuer le nombre de tours inverse de celui contenu dans la variable et tout rentrerait dans l'ordre. Une autre solution: les pins POGO, contacts à ressort, technique utilisée pour maintenir le contact dans les enrouleurs de certains aspirateurs ou dans les dispositifs tournants comme par exemple les selfs à roulette des boites d'antenne en radio haute-fréquences. Les contacts solidaires de la partie tournante frotteront sur un PCB fixé sur le PAP, PCB relié au PIC.


Découpe des bagues à la CNC:

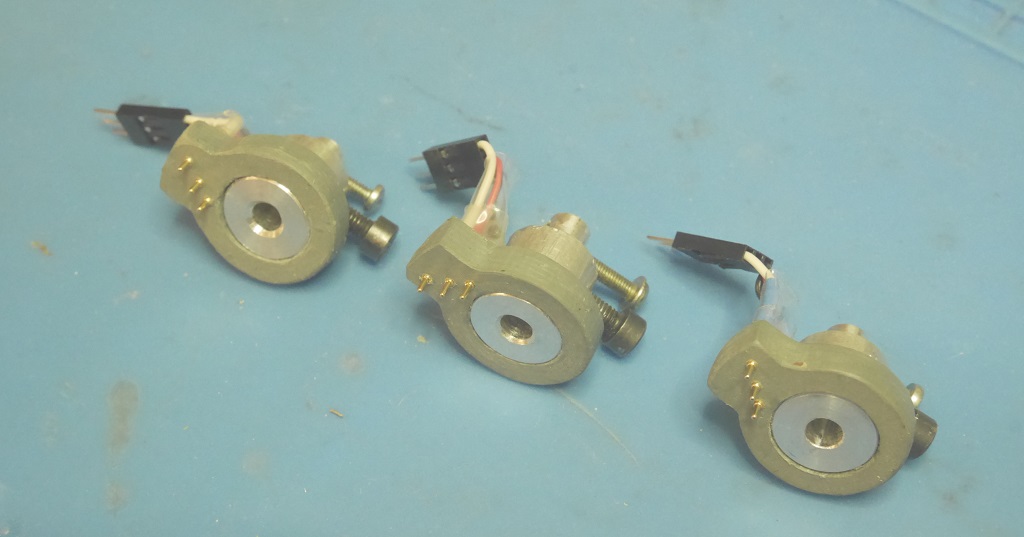
Succès: pince libre en rotation

