|
by Dipl. Ing. Robert Tyrakowski , DK7NT Dr. rer.nat. Horst Schütze, DF7HSA Dipl.Ing Klaus Osterschek, DB4MP
|
Last
update: 21-August-2001
PART 2 Controlled Reference Oscillator (CRO) biased by GPS & ZDF (TV-based references)
byDipl. Ing. Günter König, DJ8CY
Dipl. Ing. Robert Tyrakowski , DK7NT
Dr. rer.nat. Horst Schütze, DF7HSA
Dipl.Ing Klaus Osterschek, DB4MPTranslation by Lutz Hannig, DL9GI (Draft 30 May 2001) [email protected]
ANALOGUE PART HARDWARE
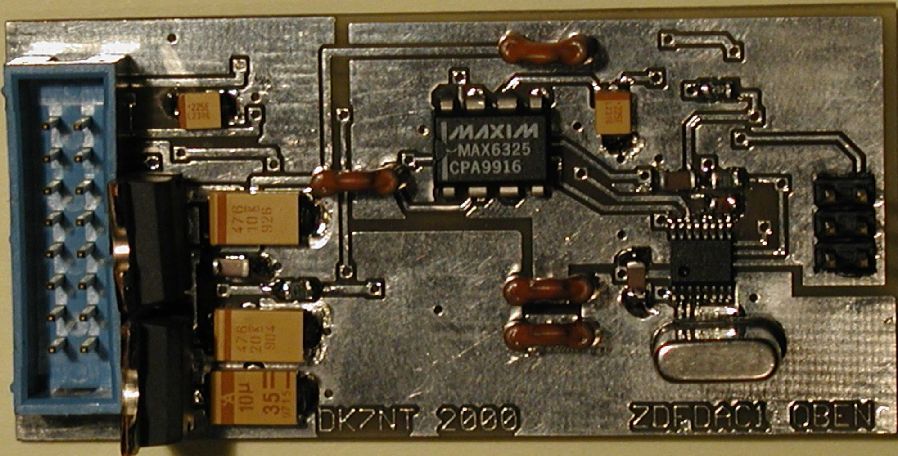
The most important analogue parts of the CRO (Fig. 6) are a 20-bit Digital-Analogue-Converter (DAC) and a high precision voltage reference. Much time was spent choosing the right DAC. Finally the so-called Delta_Sigma DAC by the Burr-Brown company [7] came out on top. It is well known for low power consumption, perfect linearity and has in addition the possibility of on-chip calibration. For a microprocessor is built in, an additional quartz is needed. A little disadvantage might be that the DAC only comes in so-called SSOP-housings, which is quite a challenge even for those who are used to SMD-soldering. The output of the DAC is fed through a low noise amplifier and than to the control input of the oscillator in order to bias his frequency electronically. This connection should be established with a very short wire. Even at normal load no voltmeter should be connected, for normal voltmeters do not have the needed resolution and furthermore unwanted interferences are caught over the connecting cables of the instrument.
The 2.5 V reference feed was found quickly. Maxim [8] offers an extreme low-noise (1.5 FVpp), high precision (0.02%) and temperature-stabilized (1ppm/°C) voltage-reference, which is not cheap. The highly stabilized 2.5 V are buffered low-noise und fed to the DAC. The connection to the digital part of the CRO is established by a 3-wire connection. Simple buffer stages with series resistances uncouple both circuit boards. Both voltage regulators should be high quality low-noise series regulators.
Great care was taken in the circuit design to clearly separate digital and analogue signals. Thus feedbacks from the digital part into the outgoing analogue-signal could be prevented. The circuit board again fits into a standard, tin-plate housing in which only a few lead-ins have to be built in.
It is worth mentioning again that it is feasible for the power supply to use the main transformer of the oscillator, especially if the oscillator is meant to run constantly.
Figure 6: CRO Analogue part
PC-TOOLS
For a constant monitoring of the CRO and for the control of chosen settings PC-Tools are at hand which provide all essential information of the CRO for the operator in a user-friendly format. Under normal circumstances all information are shown on the LCD-display if it is connected. However, this is not necessarily mandatory. During normal operation each second a set of important data is fed over a 232 connection-jack. If a PC is connected the LCD-display can be simulated on the computer screen as a virtual LCD-display via the program CROCON.EXE. The program CROONLINE.EXE prepares the data for a simultaneous display format, they are displayed in a graphical and a numerical form. At the same time diverse calculations are taking place, these results are displayed also. The data sets coming from the CRO are stored for documentation and later evaluation with the tool CROCON.EXE in an extra file. The data format is strictly binary, which on one side produces compact files and on the other side allows the use of other statistic tools. In addition the program CROCON.EXE is able to store all pre-settings, all other measured data and the calculated regulating characteristic. All this data can be modified and stored back into the CRO.
For the statistical evaluation of the received GPS-satellites the program GPS2.EXE is at hand. It processes the amount of visible satellites and documents how long how many satellites have been visible. From this data, conclusions about the quality of GPS as a reference for a certain location can be drawn.
The programming of the 8051 derivative is managed by the tool ISP.EXE and provide by the Temic/Amtel Company.
All tools can either be downloaded from the author's homepage or at least hints are given where they are available. A detailed reference manual of diverse programs is available as a separate file also. Furthermore construction manuals for GPS- and TV-receivers can be found on this homepage (http://www.qsl.net/dk7nt).
RESULTS
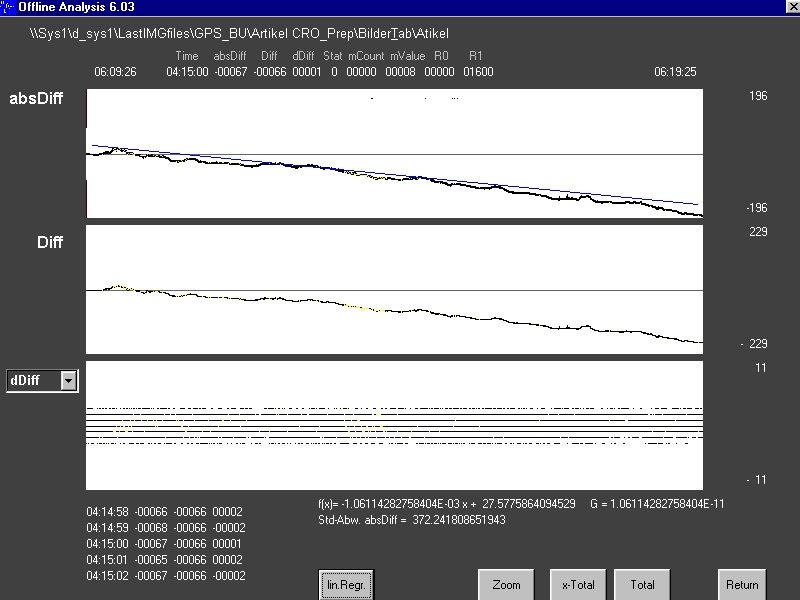
All following measurements have been made with the today usual standard frequency of 10 MHz. How the CRO functions as an accurate measuring instrument can be shown in the 24-hour measurement of a rubidium standard as shown in Fig. 7. The upper graph shows the result of the phase counting as a curve. The phase-values are stored in steps of 1 s. The inserted straight line represents the relative stability over 24 h, which is in this example -1,1*10exp-11, is statistically evaluated by linear regression. The time rate for the regression can be chosen individually within the evaluation software. In the middle the digital filtered phase-counting is displayed. The scattering is clearly visible caused, among others, by the phase-jitter during the correlation in the GPS-receiver.
Figure 7: GPS-reference versus Rb-atomic standard
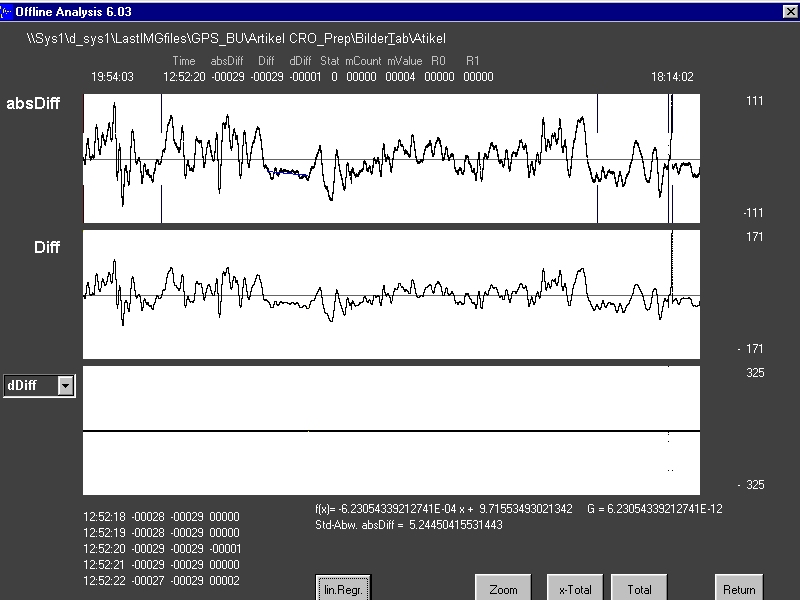
For the use of the CRO the following properties of the TV-based reference of the German TV station ZDF (other TV-stations behave likewise) should be recognized. Where the FBAS-signal is not coming from a terrestrial TV-station considerable offsets occur. The deviation can reach values of 10exp-8 if the FBAS_signal is fed front end into the CRO from a satellite receiver or via cable (i.e. if the satellite signal is fed in the cable). In the case of a satellite signal the reason for the offset is that the geostationary satellite has a precession (similar to an 8) around its nominal position. The cycle of this figure is 24 hours. Subsequently a Doppler-shift follows, which directly depends on the latitude of the receiver station. The result of a satellite track line for German latitudes can be seen in Fig. 8.
Figure 8: ZDF-standard - relative satellite movement
The measurement result in Figure 9 was recorded with an OCXO connected to an DCF77 (atomic time signal) over 46 h. The control loop of the receiver works with a time constant of = 2000 s. Thus, the output signal stability meets the requirement of modern commercial units, meaning, this state of the art result cannot be established with any home-brew device of maybe some earlier times. Clearly the path influences of long-wave transmission can be seen. For instance, during winter time a stable signal phase for OCXO-reset lies in the vicinity of 4.5 h (here 9.00 - 13.30 UTC), where values of 6.6*10exp-12 are reached. After that the maximal offset varies around 1*10exp-9 . For the quartz oscillator itself usually produces a drift in the vicinity of 10exp-10 higher useful stabilities can only be reached by integrating DCF77 and a Rubidium-standard. The stabilities in the combination of GPS and DCF77 over 24 h diverge only in the range of 10exp-12. Having in mind that the 'Physikalisch Technische Bundesanstalt' (PTB) and the National Institute of Standards and Technology (NIST) characterizes the GPS-system with 1*10exp-11 at the receiving station and that they recognize it as a trace back calibration standard, our above data have an overall high grade quality.
Figure 9: GPS-standard versus DCF77
The test possibilities with the CRO are manifold, which might be surely proven by test data of more than 30 Gbyte, which in a 14-month time period were recorded and evaluated by us. After the CRO-board was well_tried in measurement technology and the controlling software together with an optimized and drift compensated D/A transducer was finally at hand, the frequency control-loop was activated (Fig. 4). For the OCXO the type HP10811 was used. In the beginning of the measurement of the frequency control we used a second CRO-board at the output of the OCXO in order to independently record the control action and the stability. The displayed value of restsource error came to 10....5*10exp -11 and could identically be read of in the control loop as well as on the measurement device. A representative process over 9 h can be seen in the following Fig. 10, where the straight marks show the points of active adjustment. The first interval over 3 h is evaluated in Fig. 10, having a stability of - 5.6*10exp -11. This already met the standards of our project target. Impressively the second 4 h interval shows how in the first 2.5 h interval the control circuit regulates the OCXO exactly. GPS and CRO precise the measurement with a value of 3.3*10exp-12 before the drift increases to 4.4*10exp-12 enforcing another rate action. The worst values in a 10 min time interval came up to -3.3*10exp-10, this is due to interference. These unfavourable phases are displayed by the controlling software.
Figure 10: OCXO biassed by GPS
FURTHER APPLICATIONS
After finishing the works in the standard frequency range of 10 MHZ we went for the integration of an OCXO with 126 MHZ, because our second project goal culminated in the desire to synchronize master oscillators of beacons and microwave-transverters. For on one side the CRO-board accepts input frequencies up to 130 MHZ and on the other hand the fraction factor is programmable - even this experiment became a full success. Test runs with stabilities of 10exp-10 are pending. In the final stage beacons in the range of 10, 24, 47 and 76 GHZ (i.e. DBØFHR) shall be equipped with this GPS-synchronization.
COPYING
A GPS-receiver with a precise 1 PPS-output is mandatory for copying the circuit board. Good services are provided by the GPS-module MS1 OEM by the u-Blox company. A detailed description has been published in the CQ-DL magazine (7/2000) by the DARC ham radio club (www.darc.de). The title of this publication is 'Miniatur GPS-Empfänger als Signalquelle für Normalfrequenzgenerator' - and a copy can also be found on the homepage of the author at (http://www.qsl.net/dk7nt).
The copying of the CRO-subassemblies is strictly limited to private use only for ham radio operators and for their private risk. All wiring diagrams, software, even updates, can be found in the WEB under the above homepage address. However, the developing team reserves the right not to publish the software of the FPGA's. In this was we were able to build in a measure of safety in preventing third parties from participating in our patent for free. The project took us two years of troublesome developing time, spiced with hard financial input. Nevertheless, the FPGAs can be bought by the interested ham radio home brewer - they come fully programmed and copy protected.
The CRO-team is eager to find a dealer where all parts or even complete units can be purchased. At the proper time this dealer will be published under the above homepage address. Those who have not direct access to the Internet can write to the following address, sending a self-addressed envelope with a clean recordable CD:
Dipl.-Ing.Klaus Osterscheck
Marienberger Str. 29 A
D-83135 Schechen
Germany
ABSTRACT
Finally, it should be mentioned that the stability of the CRO-board can be improved by the use of high grade OCXOs, they shape up the stability by 1 to 2 decimal power. The limit for the used OCXOs lies in the region of 10exp-11 for the relative stability in the attached mode, which is Rubidium quality. All environmental and aging effects, as well as the so-called retrace problem complex of local standards, are compensated by attaching an acknowledged calibration standard.
We have endeavoured to push the optimization of the CRO-board forward. All new events in this respect can be found on the above homepage. A special thanks is due to Alexander Görich and Andreas Mangler (DD4IV) and to all the others who provided essential suggestions during realization and still support the ongoing project with great enthusiasm.
References
[1] Fernseh- und Kino-Technik 48. Jahrgang Nr. 1-2/ 1994
[2] Wireless & FC - www.atmel.com
[3] RS 232 Device, refer to [8]
[4] FPGAs - www.altera.com
[5] Pulse separator - www.genum.com
[6] PLL-IC - www.icst.com
[7] DAC - www.burr-brown.com
[8] Reference standard - www.maxim-ic.com
Information about First and Second Regression
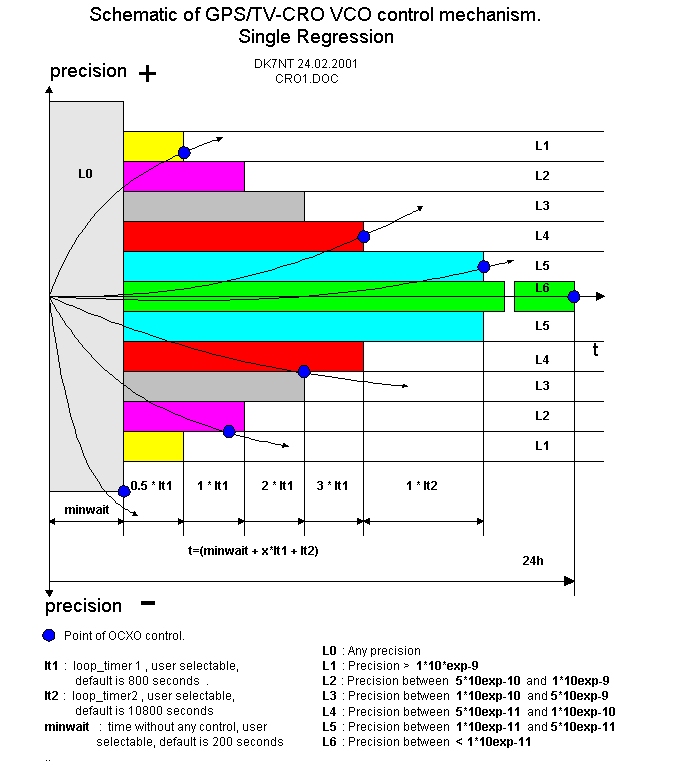 |
Diagramm: Chriteria for 1.Regression |
|
|
Diagramm: Chriteria for 2. Regression |