2m Development
From the outset I'd like to say that the comments, solutions and experiments are my own and are not necessarily correct. I'm still experimenting and my ideas are changing all the time.
My first development was to design a new 2m receiver. I think the ROX2T reveiver works brilliantly but I wanted to put my engineering experience to good use and 'fiddle about a bit'.
Here you can see my 'bloodhound' 2m receiver. It is based around an SA636 receiver IC. It is a synthesised system using a AD4360-9. It also incorporates an 18F2520 and an LCD readout. For phasing tests it is fitted with an AS193-3LF antenna switch. The ugly coil you see was only temporary!
Apart from the obvious radio features, it generates an audible squeeler in one earphone and the demodulated audio in the other. The squeeler is driven via the RSSI (Received Signal Strength Indication) to emit a pitch which relates to the strength of the received signal. It makes the determination of the strongest beam heading relatively straightforward and since it has a good dynamic range a good sense of distance is also achieved however, as you'll read later, this is only an estimate.
Here it's built around a 3 ele yagi designed for approx 7dBi and +/-32 degrees 3dB beamwidth. Most of my ARDF kit is 'work in progress' so they usually look a physical mess. The handle is from my wife's hairdrier.
The RSSI feeds into the microprocessor and is processed to generate an estimate of fox distance.
Also included at the far end of the antenna is an electronic compass for provide extra functionality.
The RSSI feeds into the microprocessor and is processed to generate an estimate of fox distance.
Also included at the far end of the antenna is an electronic compass for provide extra functionality.
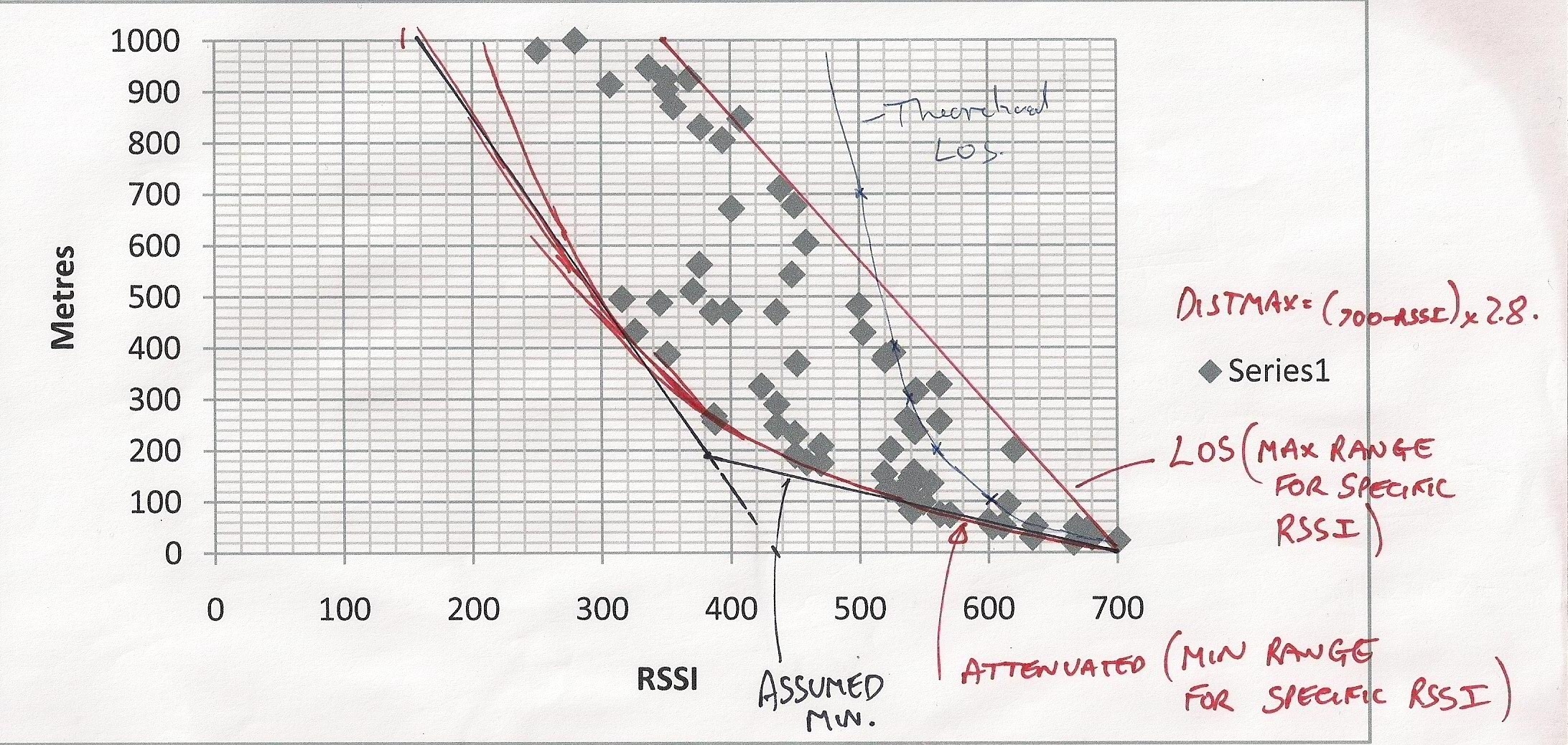
As the plot shows there is such a variation of signal strength for any given distance. For example, a signal strength of 430 could be 200 metres away or 700 metres away.
There are a multitude of reasons for this but the fact remains that an isolated signal strength measurement is not a good determination of distance.
There are a multitude of reasons for this but the fact remains that an isolated signal strength measurement is not a good determination of distance.
As of Feb 2012 my 2m kit hasn't changed much in a year. I'm happy with the performance and I consider my development time is best spent elsewhere. I would like a better electronic compass which I'm working on and hopefully I'll report on that as and when. See the compass page for more information (click on the compass icon above).
I haven't looked at anything to do with Angle of Arrival. This is based on processing the differential received phase from multiple antennas to derive a heading. I'm still interested in this but there are not enough hours in a day, Simba the dog needs his walks every day! I worry a little about the practicalities of carrying such an antenna system, I fear that it may be too cumbersome. Despite my negative concerns I do think it'll offer a massive advantage over the beam swing method. Data could be collected and processed for the whole time the transmitters are on, multipath effects will average themselves out leaving a more accurate heading. Also information relating to foxes that are 'out of present interest' to the competitor can be used or stored rather than be ignored.
I haven't looked at anything to do with Angle of Arrival. This is based on processing the differential received phase from multiple antennas to derive a heading. I'm still interested in this but there are not enough hours in a day, Simba the dog needs his walks every day! I worry a little about the practicalities of carrying such an antenna system, I fear that it may be too cumbersome. Despite my negative concerns I do think it'll offer a massive advantage over the beam swing method. Data could be collected and processed for the whole time the transmitters are on, multipath effects will average themselves out leaving a more accurate heading. Also information relating to foxes that are 'out of present interest' to the competitor can be used or stored rather than be ignored.

Distance estimation
I carry out a little more processing and use the RSSI measurements to provide a maximum and minimum range for the fox. The display shows a few different processed results and looks a little confusing, perhaps it is!
The image here is capturing noise inside a house and is therefore showing rubbish results.
The electronic compass heading can clearly be seen.
The image here is capturing noise inside a house and is therefore showing rubbish results.
The electronic compass heading can clearly be seen.
After about a year of using the distance estimation function I find that I don't use it in a real event. Due to the number of variables and therefore the lack of accuracy, the priority I give to the displayed information is low. The practicalities of reading the display while running is obviously a little difficult also. However I think that the main reason why I don't use it is that I am continually being fed the same information via the squeeler function via audio.
Our brains are pretty good at processing information and I can now interpret the change in pitch of the squeeler to far better effect than the LCD display.
The squeeler is always on, I can therefore average, peak detect and estimate within my own brain. I can sense the rate of change of pitch which is a good determining factor of distance from the fox. I find it difficult to explain in words what information the squeeler gives but I instinctively know that it is significant. Of course, this improves with practise.
Distance estimation using signal strength has therefore been placed in the lower layers of the 'to do' list.
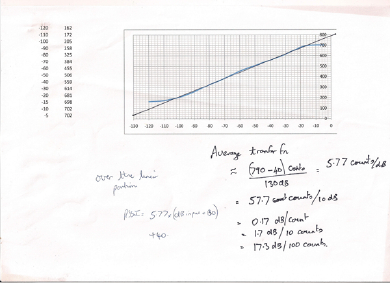
Click on the image to the right to show the dynamic range of the RSSI signal. The plot shows RSSI level on the Y axis versus input signal (dBm) on the X axis.
It offers between 90 and 100dB of range so no attenuators are needed to be switched and the operation is far more simplistic and linear.
Depending upon fox power and position it'll typically work from several Km down to less than 5m.
It offers between 90 and 100dB of range so no attenuators are needed to be switched and the operation is far more simplistic and linear.
Depending upon fox power and position it'll typically work from several Km down to less than 5m.
Electronic compass
The electronic compass I use is an OS4000 from Oceanserver. At the time it was the best I could find. It communicates to the microprocessor using RS232. The big problem with electronic compasses are that they are great when using them level but as soon as they are tilted they become very inaccurate.
This unit is a tilt compensated compass which I thought would satisfy my needs.
Unfortunately not.
The method of tilt compensation uses accelerometer sensors to measure gravity in its own 3D reference. It can then determine its pitch and roll and therefore apply compensation to arrive at the correct magnetic heading.
This unit is a tilt compensated compass which I thought would satisfy my needs.
Unfortunately not.
The method of tilt compensation uses accelerometer sensors to measure gravity in its own 3D reference. It can then determine its pitch and roll and therefore apply compensation to arrive at the correct magnetic heading.
So far, so good. However, when the compass moves, it will accelerate. Since the internal sensors measure acceleration, they output a combination of the static gravity and the dynamic acceleration and therefore upset the pitch and roll calculations.
The overall result is that when the compass is moving the heading is inaccurate and so it can only be relied upon when relatively still.
Despite this I find the compass function useful, consideration must be given to the fact that normal compasses cannot be used effectively while running, so no real disadvantage. Perhaps orienteers will not agree but I find the electronic compass easier to use. Rotate, stop and read. No parallax errors and I can elevate my antenna high, for best receive, and still read the heading. I can make offsets in the firmware for different declination if needed (see 80m development) as well as many other processing bells and whistles!
It is built as a module and I fit it to the 2m or the 80m kit as necessary.
The overall result is that when the compass is moving the heading is inaccurate and so it can only be relied upon when relatively still.
Despite this I find the compass function useful, consideration must be given to the fact that normal compasses cannot be used effectively while running, so no real disadvantage. Perhaps orienteers will not agree but I find the electronic compass easier to use. Rotate, stop and read. No parallax errors and I can elevate my antenna high, for best receive, and still read the heading. I can make offsets in the firmware for different declination if needed (see 80m development) as well as many other processing bells and whistles!
It is built as a module and I fit it to the 2m or the 80m kit as necessary.
Current status
I have more to say on electronic compasses on the compass page.
G4KWQ
