
Petit bricolage pour mettre en pratique le protocole I²C. Détection des obstacles par ultrasons, un module PIR servait à la détection de mouvements. Deux petits moteurs démultipliés pour la motorisation. Quand GUST4VE détectait un obstacle il s'arretait, explorait l'espace à gauche et à droite, courte marche arrière et repartait dans le sens ou il y avait le moins d'obstacles. S'il détectait un mouvement externe il mettait le cap dessus. Deux FCOduinos reliés en I²C géraient le système, un maître s'occupait de la détection et commandait l'arduino esclave pour la gestion moteurs en PWM. Tout çà était presque au point, mais il a fallu qu'il prenne ma minette Waza pour cible et il n'a pas résisté à la confrontation. A la suite de çà je me suis désintéressé du projet pour un temps et la batterie chinoise n'a pas résisté à une décharge prolongée. Il me reste la base, projet à reconstruire.
La première version était équipée de roues en bois recouvertes de chambre à air de VTT et moteurs d'imprimantes. L'entrainement se faisait par des pignons d'imprimantes.


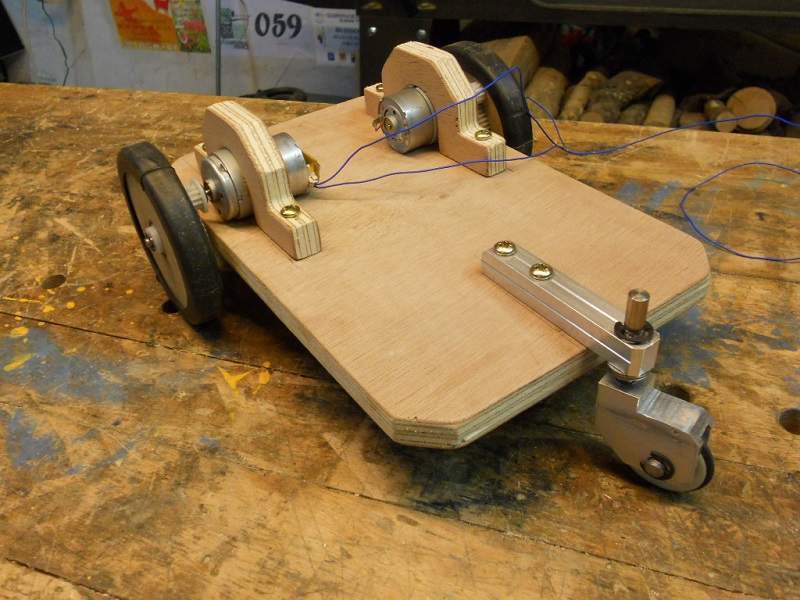
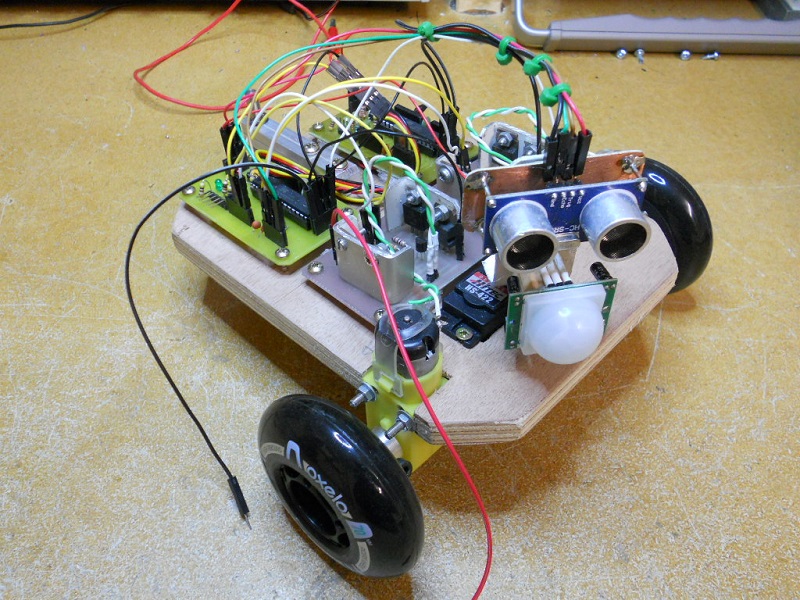
Un servomoteur permet au module ultrasons de pivoter sur 150°.

Ces petits moteurs d'imprimante ne donnaient pas satisfaction, pas assez de couple, on ne pouvait pas mettre un PWM trop bas sinon ils s'arrètaient. J'ai ensuite changé pour des moteurs démultipliés trouvés sur Ebay.
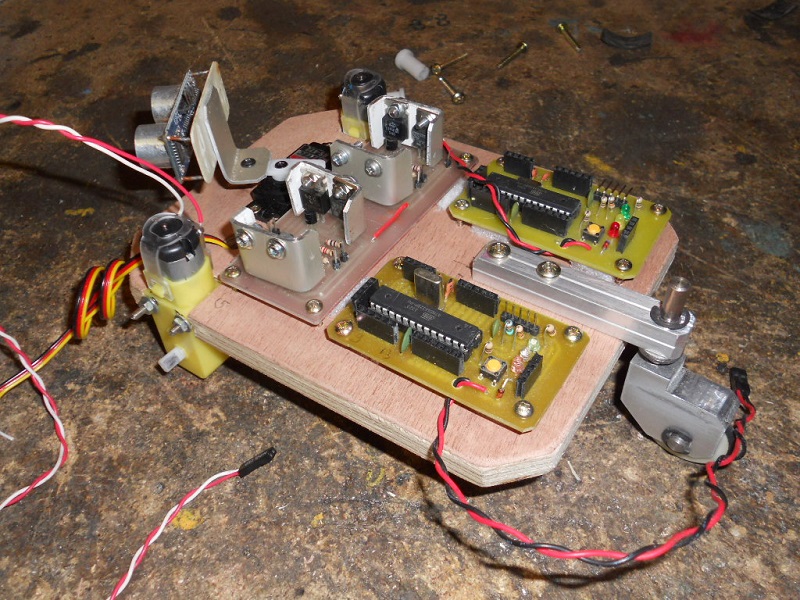
Ajout d'un deuxième FCOduino, les deux reliés en I²C. Le maître s'occupera de la détection et donnera à l'esclave les ordres pour la gestion des moteurs.
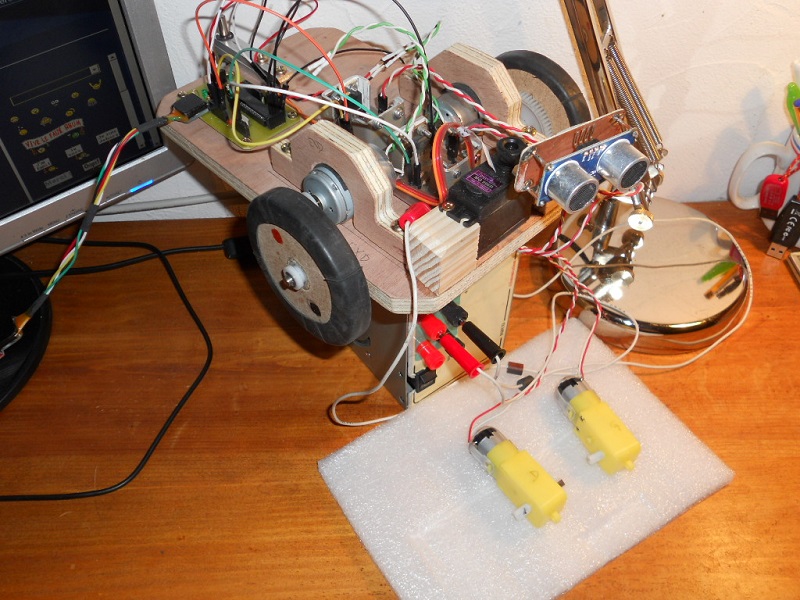
Marquage sur les roues bien pratique pour les essais. Il a aussi hérité d'un module PIR pour la détection des êtres vivants, j'aimerai bien qu'il devienne copain avec mes deux chats et le lapin nain.

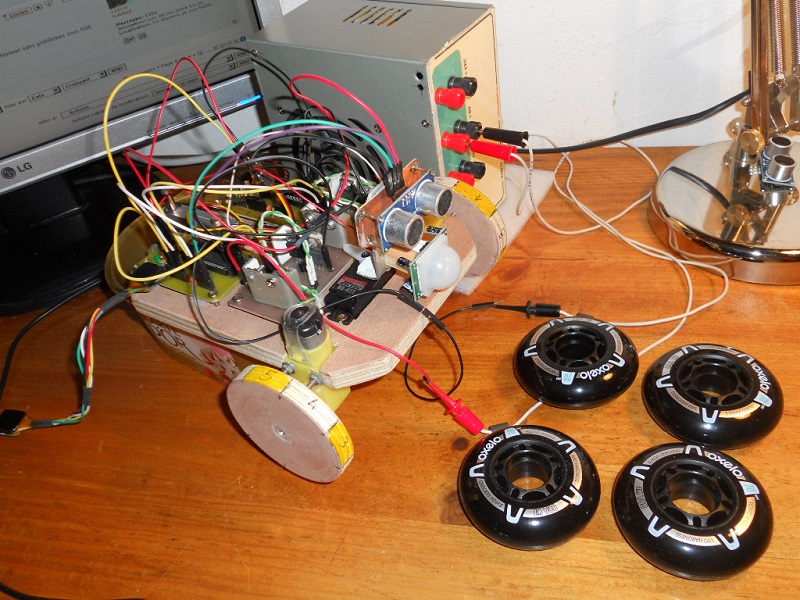
Et comme rien n'est trop beau pour Gust4v3 il a eu de jolies roues de roller.
Le module PIR étant trop omnidirectionnel, j'ai fais quelques essais pour essayer de le rendre plus sélectif. J'ai juste réussi à rendre Gust4v3 ridicule.


Essais de reconnaissance d'obstacle. La programmation avance tranquille. Gust4ve avance, détecte l'obstacle, recule, explore l'environnement, tourne à droite et repart plein pot. Il reste à lui apprendre à tourner à gauche, choisir une route libre et faire le choix de tourner dans le bon sens.
Gust4v3 est devenu capable de choisir dans quel sens repartir suivant les obstacles détectés lors de l'analyse semi-circulaire.
Premiers essais en liberté et en free-style. Ca fonctionne mais il y a encore des mises au point à effectuer. Il est encore un peu nerveux et a de gros soucis d'adhérence sur le carrelage, les anciennes roues enrobées de chambre à air auraient surement été plus efficaces. On voit qu'il détecte encore les obstacles trop éloignés, il va falloir jouer sur la sensibilité du capteur et aussi régler les valeur du PWM pour le calmer.
Toute l'équipe (c'est à dire moi) a le regret de vous informer du décès subit de GUST4V3 suite à la confrontation avec un fauve sans pitié deux fois plus gros que lui.
C'est de ma faute, je n'aurais jamais du l'équiper d'un module PIR; il a foncé directement sur le chat, deux coups de patte, dépeignage, et l'affaire était pliée.
Waza s'est encore une fois prise pour Sarah Connors.
Il suffirait de le recâbler mais je me suis lassé d'arduino et suis en pleine migration vers les PIC. Un jour peut-être il renaîtra avec un cerveau PIC. En attendant il va prendre sa place sur les étagères des trucs en cours
mais qui seront terminés un jour, c'est sur... Je souffre d'un mal grave assez répandu chez les makers: la multilièvrite, il ne faut pas qu'un projet dure trop longtemps sinon je me lasse...
Un grand merci pour son aide à Waza, (surnommée "Sarah Connors").

