
Envie d'étudier la cinématique inverse, pour cela il me faut un bras robot. Les servomoteurs du projet R0G3R. ayant montré leurs limites je vais cette fois changer de technologie. Je me suis inspiré des bras robots professionnels qui servent à déplacer des palettes, dits "paletiseurs". Ces bras utilisent un système à parallélélogramme qui évite d'avoir les moteurs situés aux articulations, donc bras plus léger et moins de poids à déplacer. Un parallélélogramme supplémentaire dont la référence est prise sur le bâti sert à garder le pourte-outil parallèle à la surface de travail. Je n'utilise plus de servomoteurs trop fragiles mais des moteurs continus qui seront asservi en position. Le bras comporte trois segments donc trois moteurs drivés par des modules L298. Chaque moteur est piloté par son propre arduino esclave, le maître gérant les mouvements est dans un premier temps un arduino mais sera certainement remplacé plus tard par un Raspberry PI.
Le premier challenge était d'arriver à asservir en position un moteur à courant continu. J'ai d'abord fais des essais en le couplant à un potentiomètre et en le transformant en servomoteur. Facile avec un arduino. Ca fonctionnait très bien mais j'avais des doutes sur la tenue dans le temps de la piste graphitée du potar. Un autre désavantage est qu'on est limité en rotation.
J'ai donc abandonné l'idée du potentiomètre, les petits moteurs Namiki étant équipés de capteurs opto, j'ai réécris le programme pour les utiliser. Contrairement au système précédent le moteur est maintenant capable de tourner indéfiniment au gré de l'utilisateur, Si par exemple on lui demande un angle de 900° il fera 2 tours 1/2. Ce qui est bien, mais il n'a plus d'origine au démarrage, ce qui n'est pas bien du tout. J'ai donc inclu un système de prise d'origine avec une fourche opto récupérée sur une imprimante.
Comme je ne savais pas trop ou j'allais pour l'architecture j'ai commencé par faire une maquette rapide à l'échelle 1, histoire de voir comment tout çà touille. Un planche, des bandes de CP 5mm et quelques tiges M4. On fait bouger tout çà à la main, on observe et on réfléchit.


A partir de là j'ai pu commencer l'étude en 3D. L'occasion d'apprendre à me servir de Freecad, un excellent soft de modèlisation 3D, pas super évident au début surtout quand comme moi on vient de Sketchup mais il faut s'y tenir. J'ai commencé par dessiner un chess'poulet.
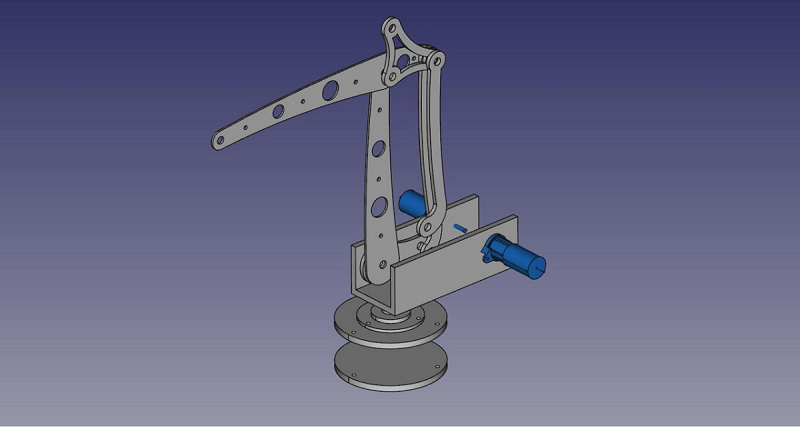
Là çà fait déjà un peu plus sérieux.
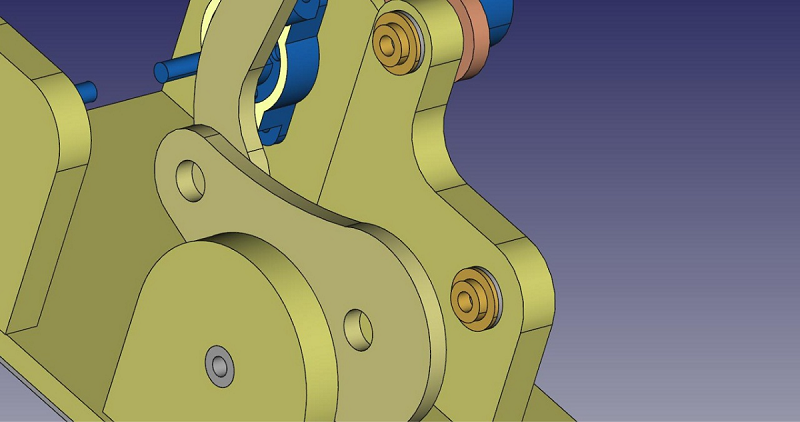
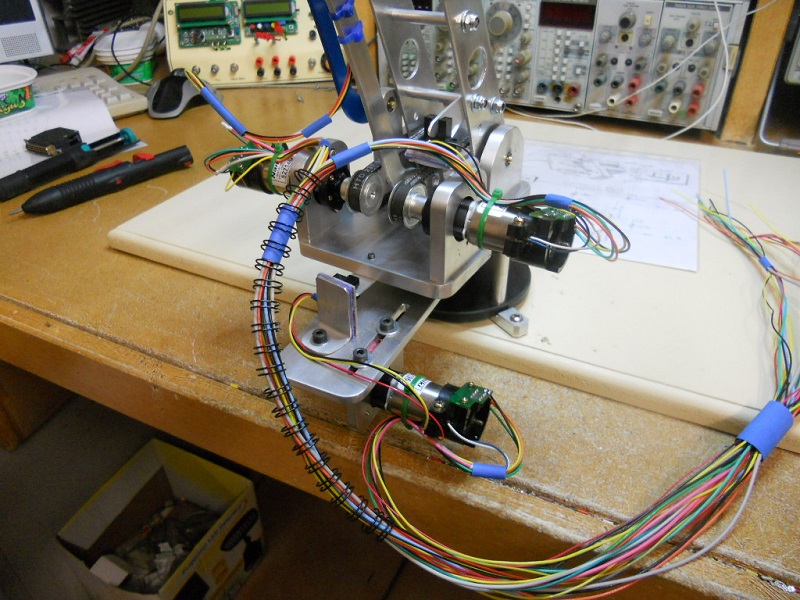
Vue de la première version du système de motorisation. Le moteur vertical génant la rotation, des modifs ont été apportées par la suite. J'ai employé des jeux de poulies avec un rapport 1/1.5, çà va lui faire perdre un peu de vitesse mais gagner en couple. Je verrai ensuite comment ça se passe aux essais et il sera toujours temps de modifier le rapport s'il y a lieu.
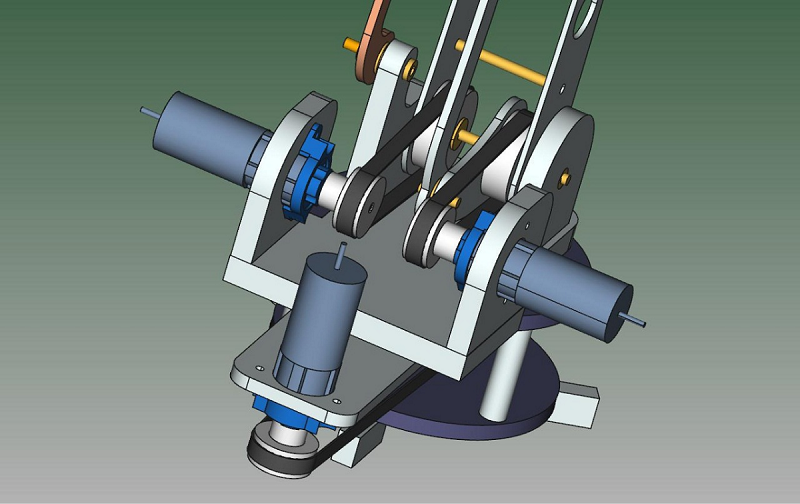
Chaque axe est monté sur des paliers en laiton tourné et est immobilisé par des circlips. Les circlips de 4mm étant très fins j'ai du me fabriquer un outil à saigner de 0,8mm d'épais pour tourner les gorges.
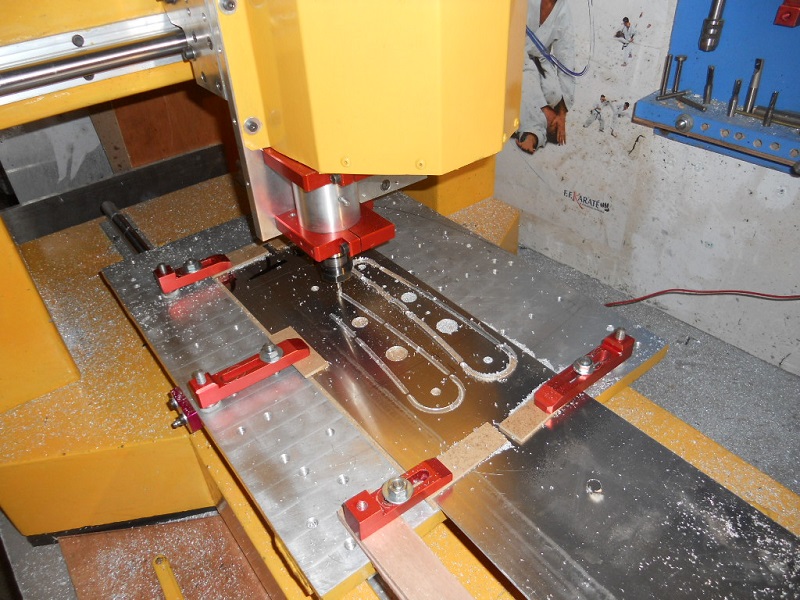
Tout çà étant encore bien virtuel je suis ensuite passé à la fabrication de copeaux. L'étude 3D finalisée j'en ai sorti des fichiers au format STL, travaillés ensuite sous Cambam pour les transformer en Gcode et enfin les donner en pâture à T1T1N3. . L'usinage se fait dans de la tôle d'alu de 2mm pour un souci de légèreté. Avec toutes les entretoises prévue ce devrait être quand même rigide.

Etape jouissive: on commence enfin à tripoter le bébé. J'ai cannibalisé R0G3R. pour récupèrer l'embase rotative.



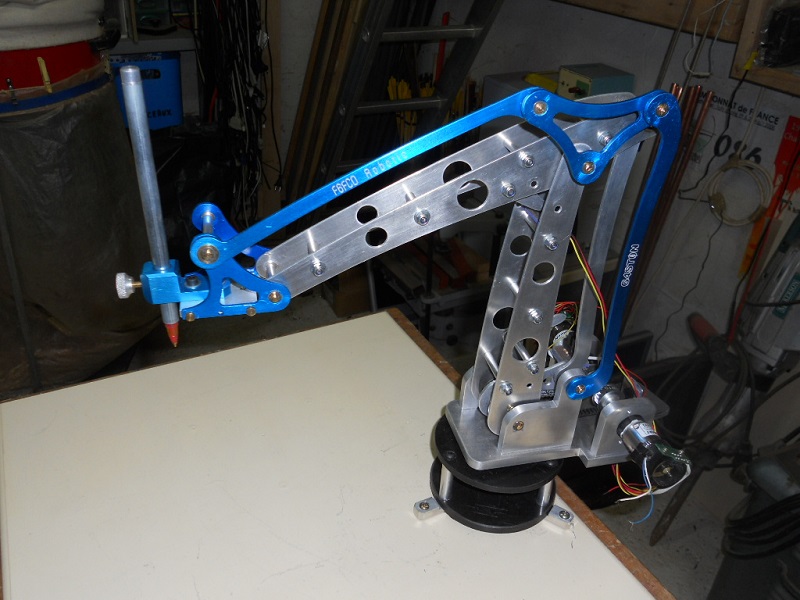
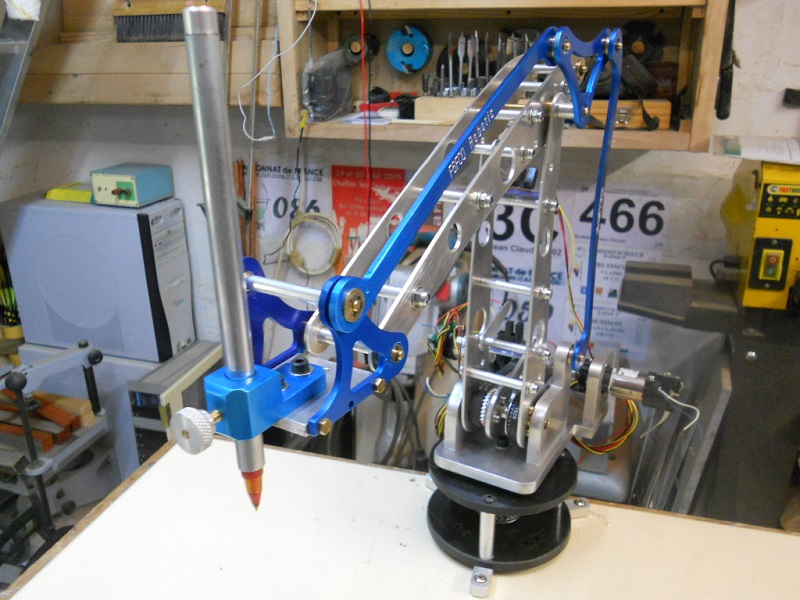
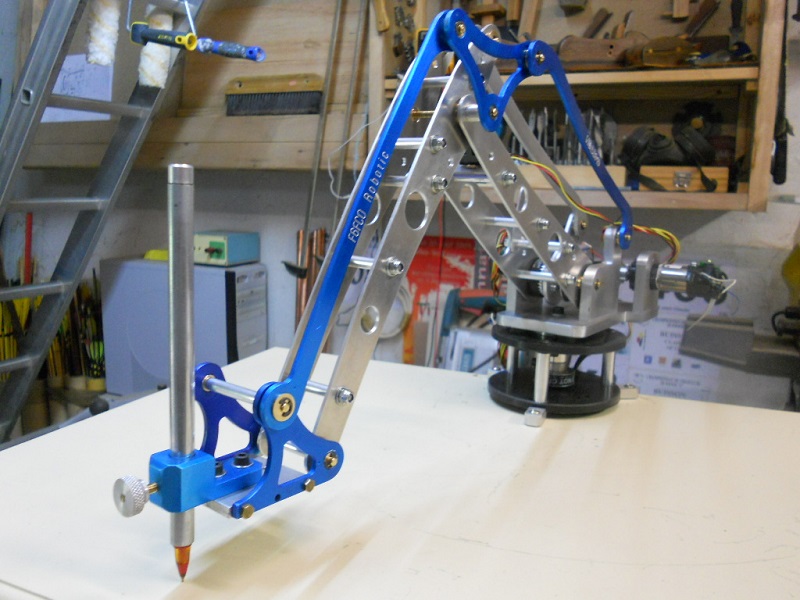
Son premier outil, un porte-crayon car je prévois d'inscrire G4st0n aux Beaux-Arts. Le tube qui reçoit le crayon est équipé d'un petit ressort pour ne pas traumatiser la pointe, G4st0n risquant d'être un tantinet incontrôlable pendant sa phase de débourrage.

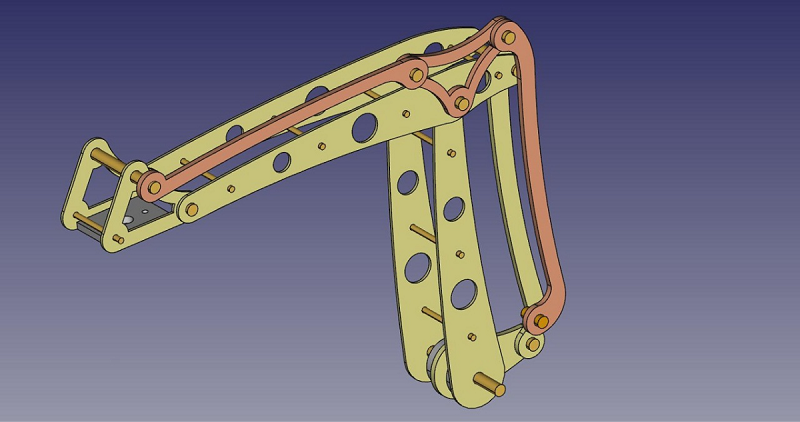
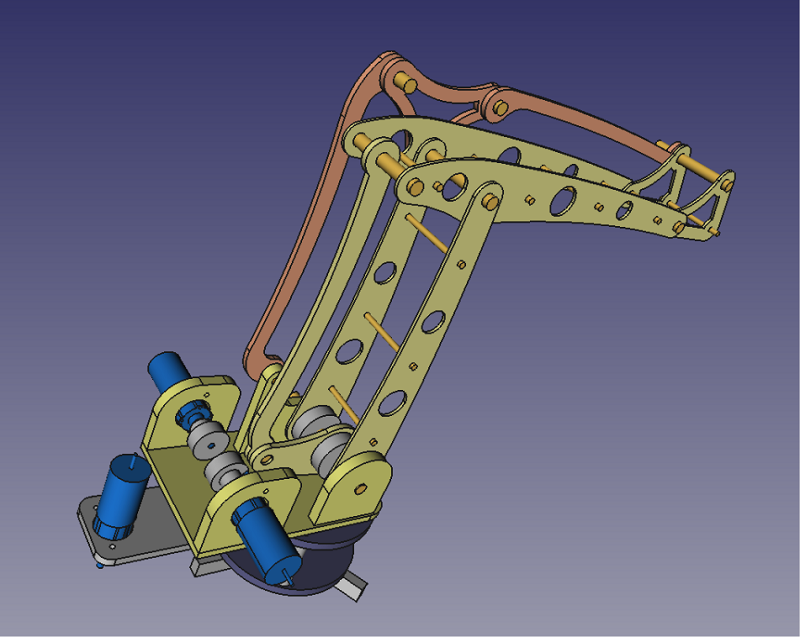
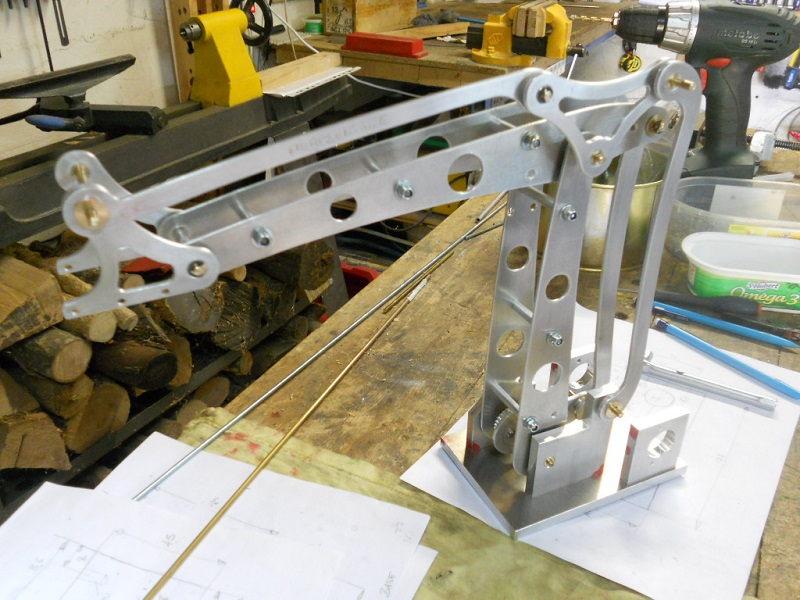
Evolution, d'un poulet on est passé à une espèce de grue portuaire. Un petit coup d'anodisation en bleu pour faire plus joli.
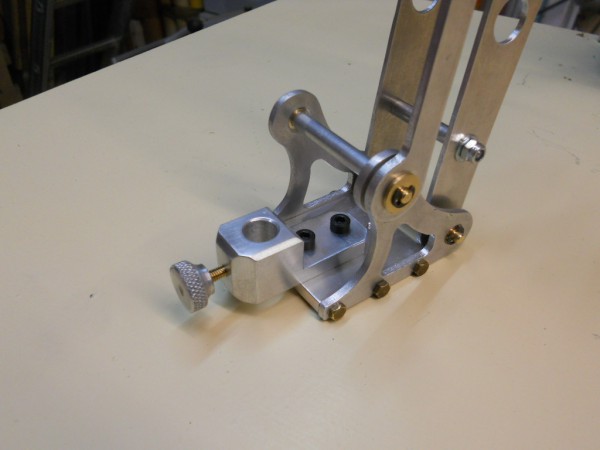
On a parlé plus haut de prise d'origine, G4st0n étant prévu pour faire plein de trucs il lui faut une référence pour savoir ou démarrer. Je lui ai installé un système de limites pour chaque moteur (donc chaque segment) qui serviront à faire une POM (Prise Origine Machine) et POP (Prise Origine Pièce). Au départ j'avais l'intention d'utiliser des ILS comme sur ma CNC béton mais j'avais quelques fourches opto dans mes tiroirs, l'occasion de les utiliser.
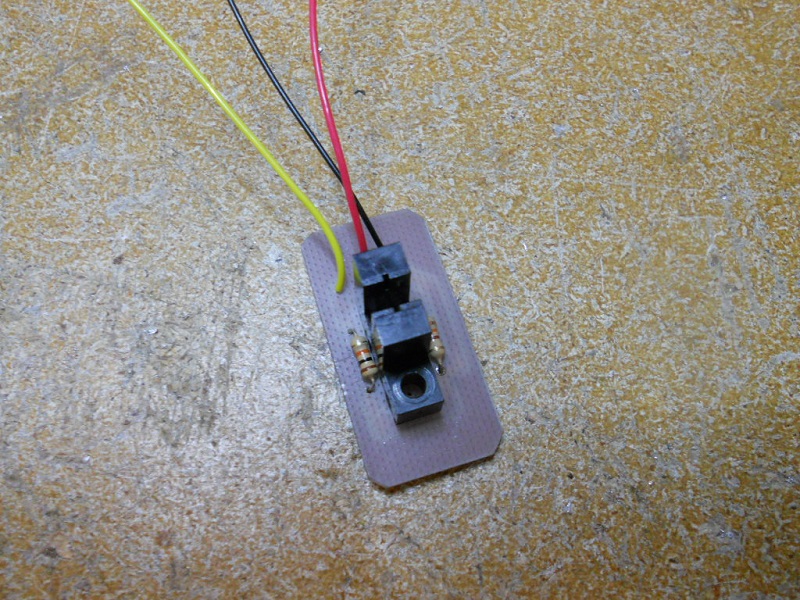
Une fois câblé
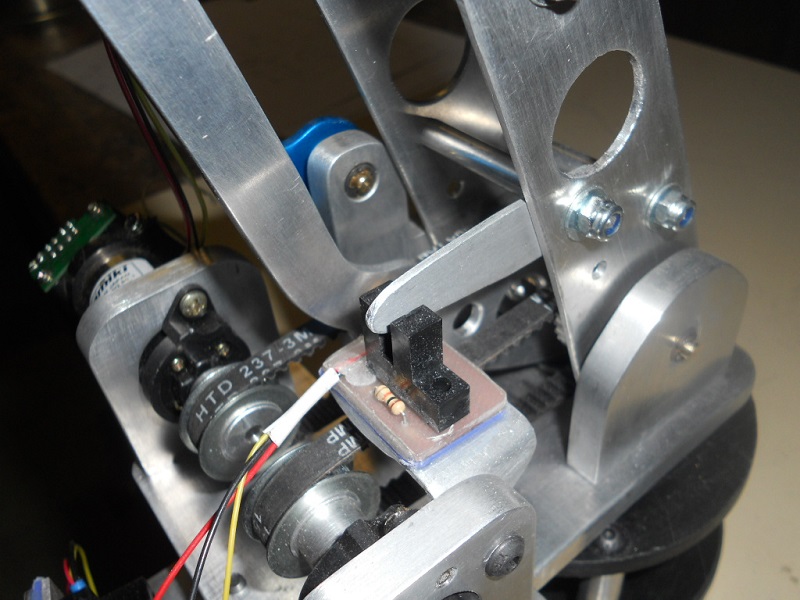
Quand le doigt se positionne entre les fourches un niveau bas est envoyé à l'arduino.
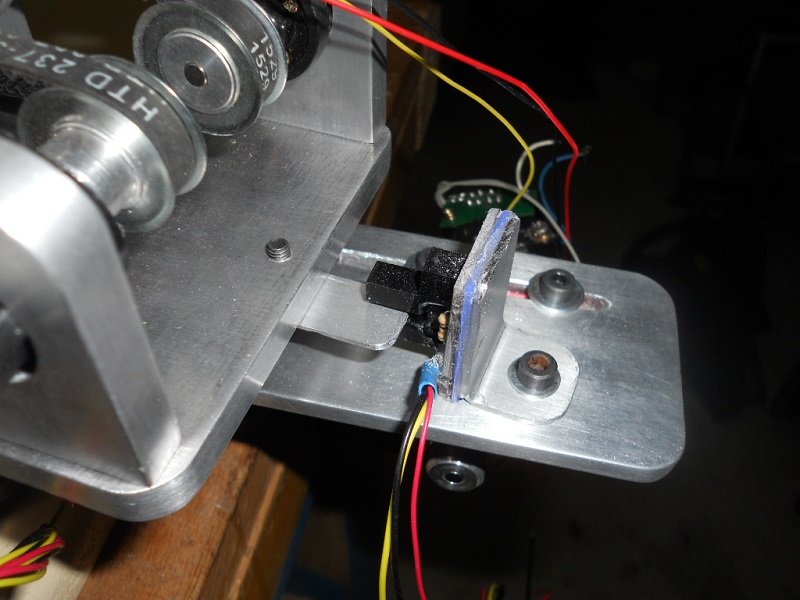
Même principe pour la rotation.
Petite vidéo pour imager tout çà.
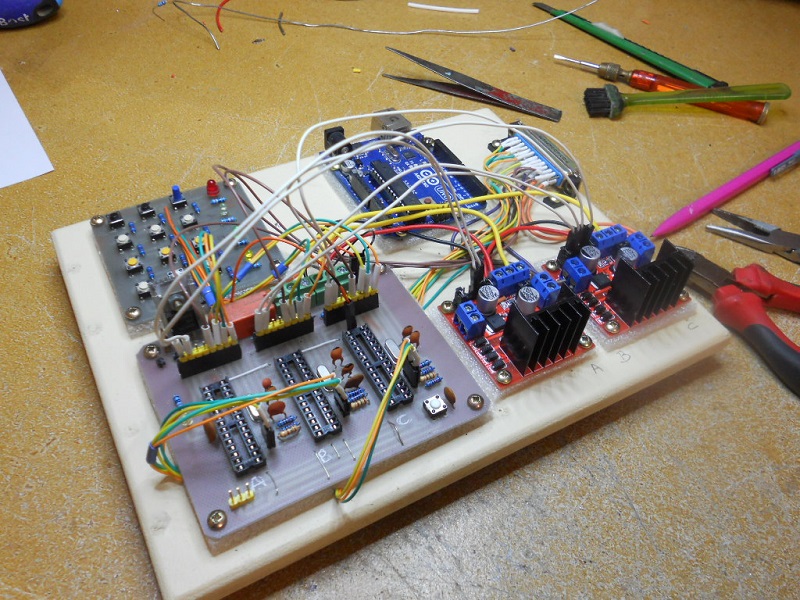
L'électronique, un clavier pour faire les POM, POP et éventuellement bouger le robot manuellement. C'est comme une CNC sauf que ce n'est pas pareil. J'ai rajouté deux poussoirs au cas-ou pour d'éventuelles nouvelles fonctions, je ne sais pas encore trop à quoi ils pourront servir mais il y avait la place et on n'est jamais trop prévoyant.
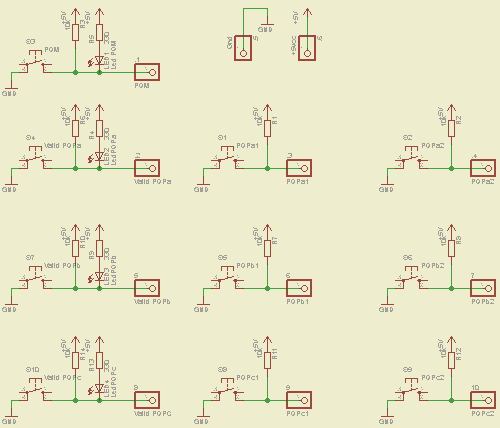
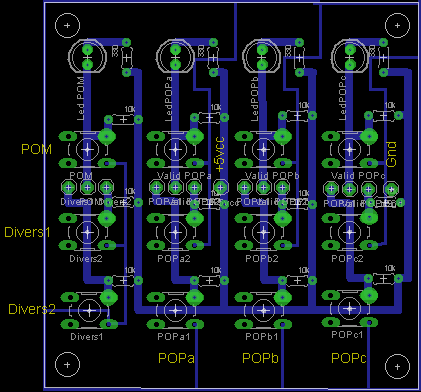

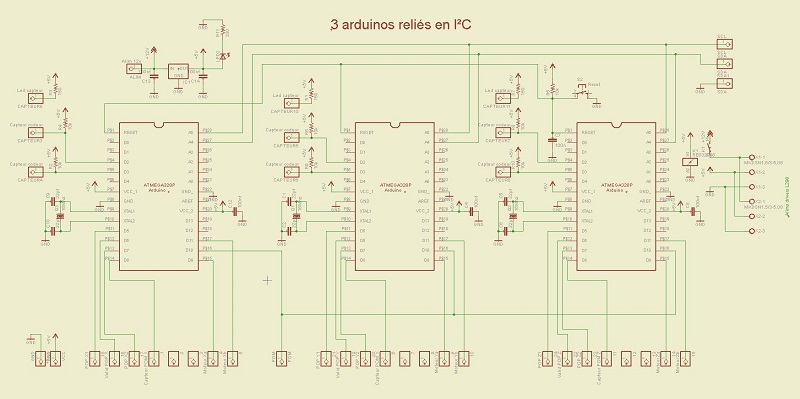
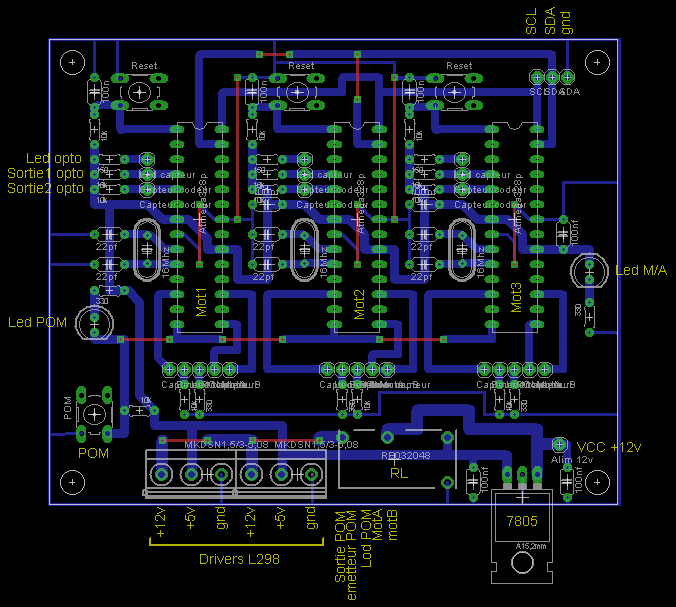
Schéma et implantation de la carte recevant les trois Atmegas328 esclaves reliés en I²C. J'aurais pu utiliser 3 arduinos séparés mais j'ai préféré placer 3 chips sur la même carte pour limiter la filasse. Et puis c'est plus FUN :D. Les drivers L298 sont très fragiles, si on commet l'erreur de les alimenter en 12v avant d'avoir branché le 5v ils fument instantanément, çà m'est arrivé quelques fois lors de mes précédents projets, surtout avec les montages sur breadboard ou un fil est vite débranché (surtout quand on bricole avec un chat chasseur de robots dans les parages...). Pour éviter cette mésaventure j'ai ajouté un relais sur la carte, le +12v est distribué seulement si le +5v est présent.
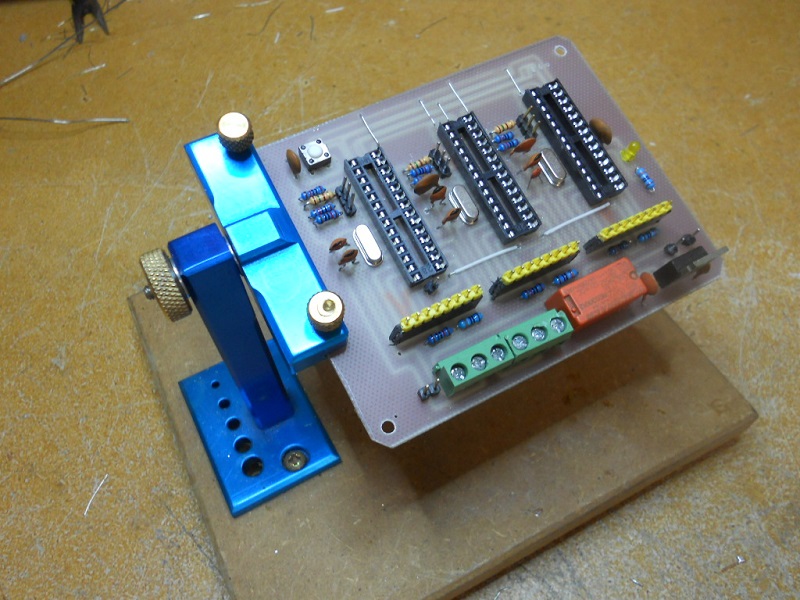
Câblage de l'électronique. J'ai choisi de tout placer sur une planchette, plus pratique pour faire la mise au point, je mettrais ensuite une plaque de plexi pour protéger tout çà. Le montage sera relié au bras par des prises mâle/femelle DB25.
Câblage des moteurs et POM sur le bras.
Premiers essais sans les microcontrôleurs pour tester les drivers et le câblage du bras. Un tantinet nerveux le G4st0n... Un peu la même chose que les étudiants testant les muscles d'une grenouille disséquée, sauf que moi je ne fais pas souffrir un pauvre animal. Tout fonctionne au poil sauf le segment supérieur dont le capteur POM à rendu l'âme. Le souci c'est que je n'avais que trois fourches opto de ce modèle, si je n'arrive pas à en retrouver un autre dans mes tiroirs je bricolerais un capteur à ILS pour ce segment.
Test de la partie microcontrôleurs et clavier.
