
Mon premier robot, lancer un appel sur la fréquence pour faire un contact radio peut s'avérer parfois un peu long, avec G1LB3RT je peux aller bidouiller pendant qu'il fait le boulot à ma place. Certains diront qu'il y a bien plus simple à faire, un simple relais relié à arduino par exemple, oui mais c'est quand même bien plus marrant de construire un faux doigt qui tape sur une vraie pioche :D L'idée de départ:

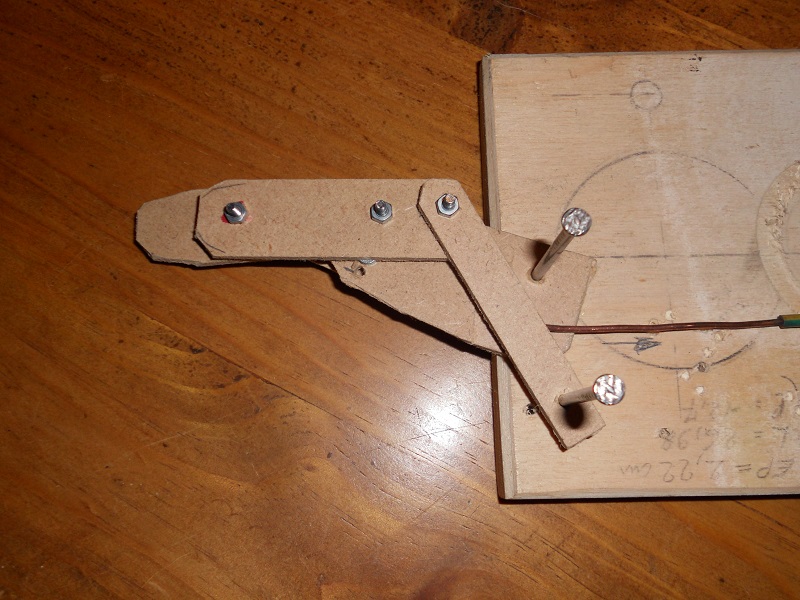
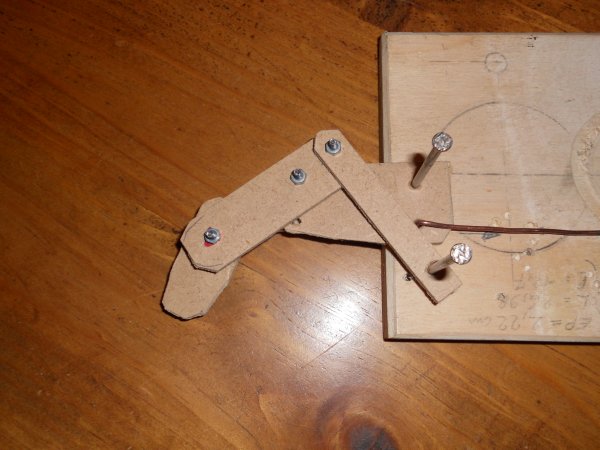
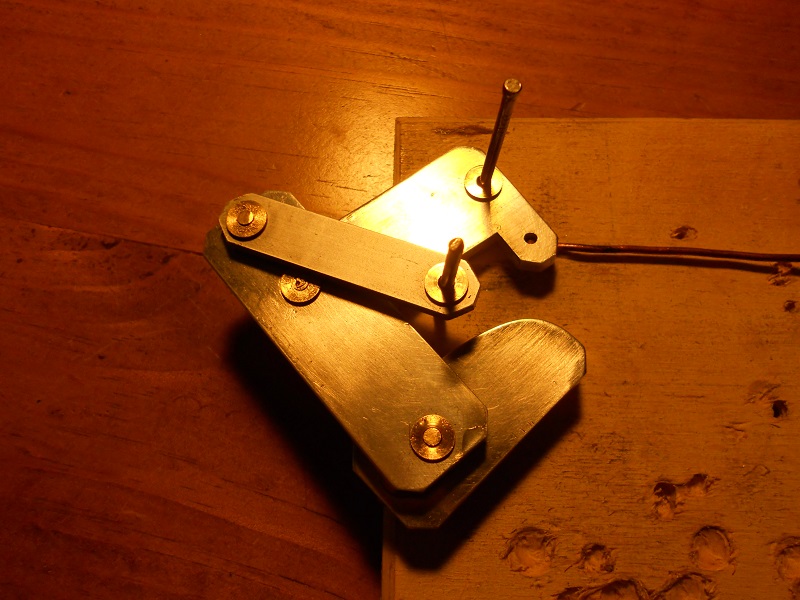
Construction d'une petite maquette rapide en bois pour étudier l'articulation du doigt, remarquez la finesse du travail d'ébénisterie. Il y avait plus performant à faire au niveau de l'articulation mais je voulais que çà se rapproche le plus possible de la morphologie d'un doigt humain.
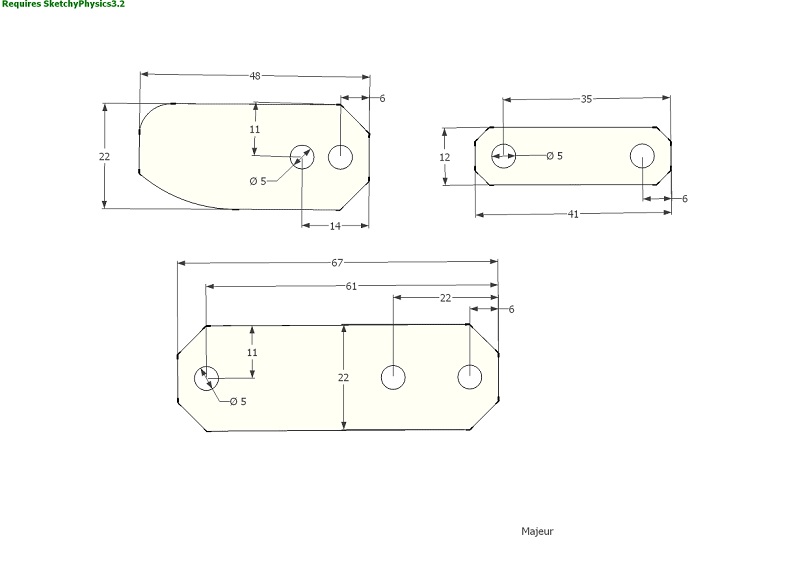
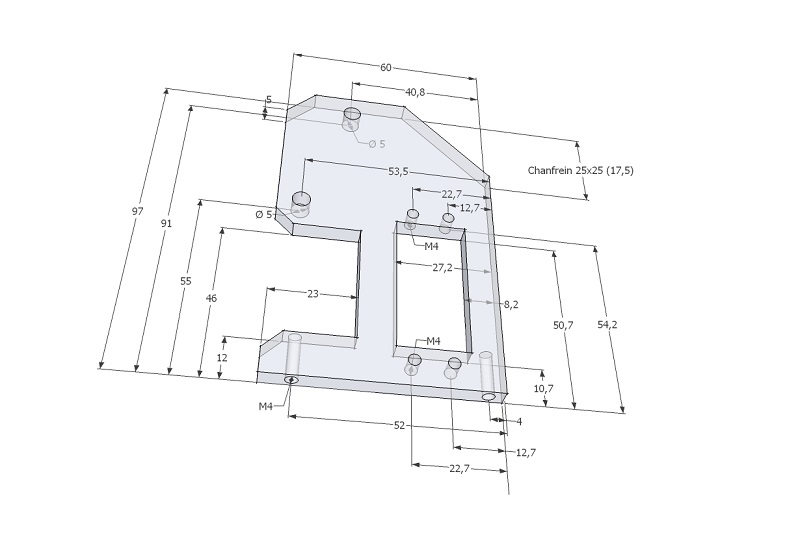
Ceci fait je suis passé en 3D pour affiner tout çà et en tirer des cotations.


Fabrication de copeaux. et premiers essais.


G1LB3RT !!!! et la foule en délire fait "Waaaaooooww !!"

Waza béta-testeuse ! Ici on fait les tests sérieusement.
G1LB3RT manipulant la pioche de la NASA.
