Je pilotais mes cnc et autres robots jusqu'à présent avec de vieux pentiums3 ou 4 sauvés de la déchetterie, ces pentium étaient équipés sur le panneau arrière d'une prise DB25 reconnue par LinuxCNC. Mon stock de PC/Pentiums de plus en plus vétustes à fini par rendre l'âme et les PC
plus récents ne sont plus équipés de ces prises 25 broches obsolètes mais bien pratiques pour le bidouilleur, il a fallu trouver des solutions.
Installer une carte DB25 PCI sur un PC récent, solution que je n'ai pas encore testée n'ayant pas de PC disponible.
Migrer sous GRBL et son gcode du pauvre, j'ai testé et pas trop aimé, quand on a roulé en Ferrari on ne se plait pas trop dans une clio diesel, je salue le travail de la personne qui a créé GRBL mais LinuxCNC est quelques crans au-dessus. En plus il me semble avoir lu que GRBL n'est
plus soutenu, alors que LinuxCNC est constamment mis à jour.
Acheter au prix fort une carte USB genre MESA capable de piloter LinuxCNC, cette solution ne me plait pas non plus pour son opacité, hormis le coté onéreux j'aime bien être maître sur mon matériel, en cas de problème avec une interface DB25 il suffit de placer
une carte rallonge pour pouvoir faire des mesures sur les signaux output step et dir sur les 3 axes, ou même envoyer des niveaux pour tester les origines, palpeur ou autre. Plus compliqué avec une liaison USB même
avec un analyseur logique.
Pour garder les avantages de la DB25 tout en passant sur une solution moderne il reste l'option Raspberry PI et son GPIO. J'ai fait quelques tests d'installation et çà tourne correctement, reste la gestion du GPIO, fragile et fonctionnant en 3.3v alors que tout mon matériel
délivre et fonctionne en 5vcc, souci réglé à l'aide d'une carte interface à optocoupleurs maison. Mais faire tourner un PI sur table et câbles apparent c'est bien mais pas très pratique et dangereux, Murphy finira toujours par laisser tomber un tournevis sur le PI. En
plus j'ai deux CNC dans des ateliers séparés, ce qui impliquerait de tout débrancher à chaque utilisation sur une machine différente, la solution d'un cyberdeck facilement transportable embarquant un PI et avec une configuration pour chaque machine est bien plus pratique et élégante.
J'ai testé le Raspberry PI5 et n'ai pas réussi à faire sortir proprement les signaux LinuxCNC du GPIO, çà a par contre très bien fonctionné avec le PI4, c'est donc lui qui sera embarqué dans le cyberdeck. Je me réserve d'autres essais ultérieurs avec le PI5.
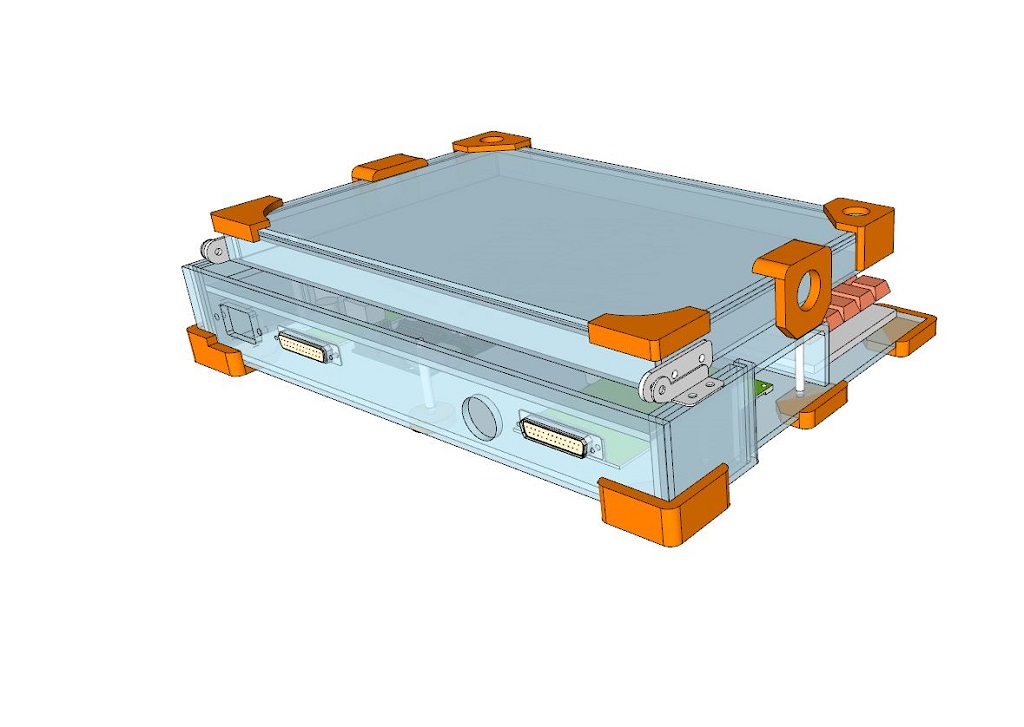
Petite étude 3D pour voir ou on va, décider de l'allure finale et produire quelques STL à imprimer.


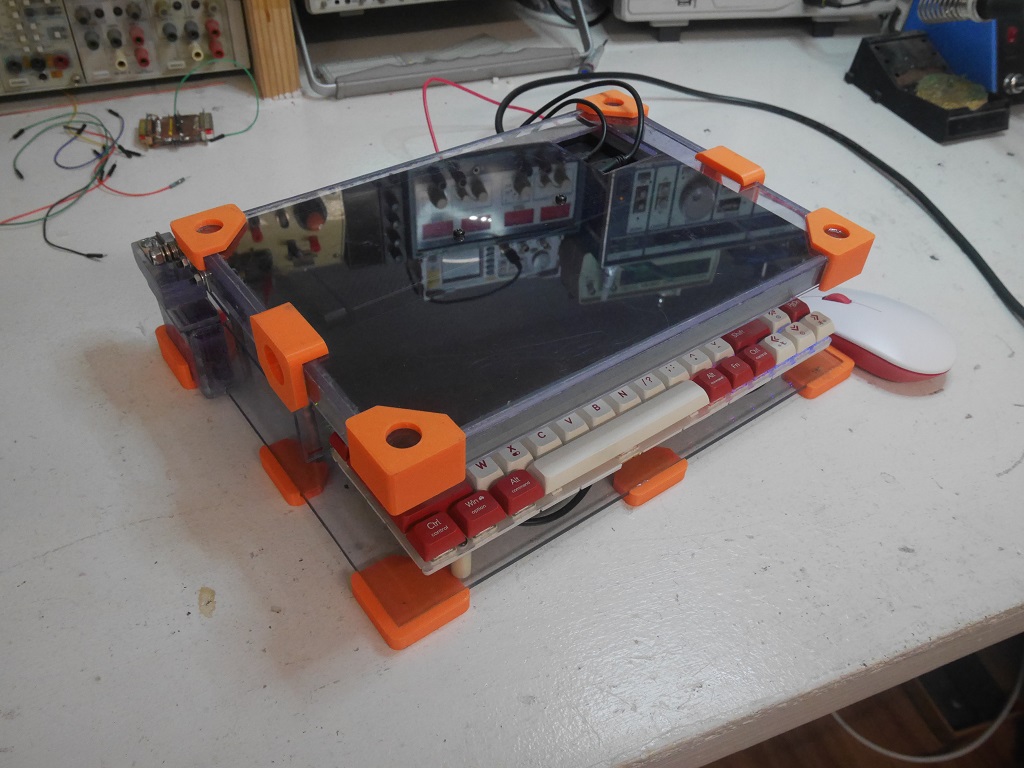
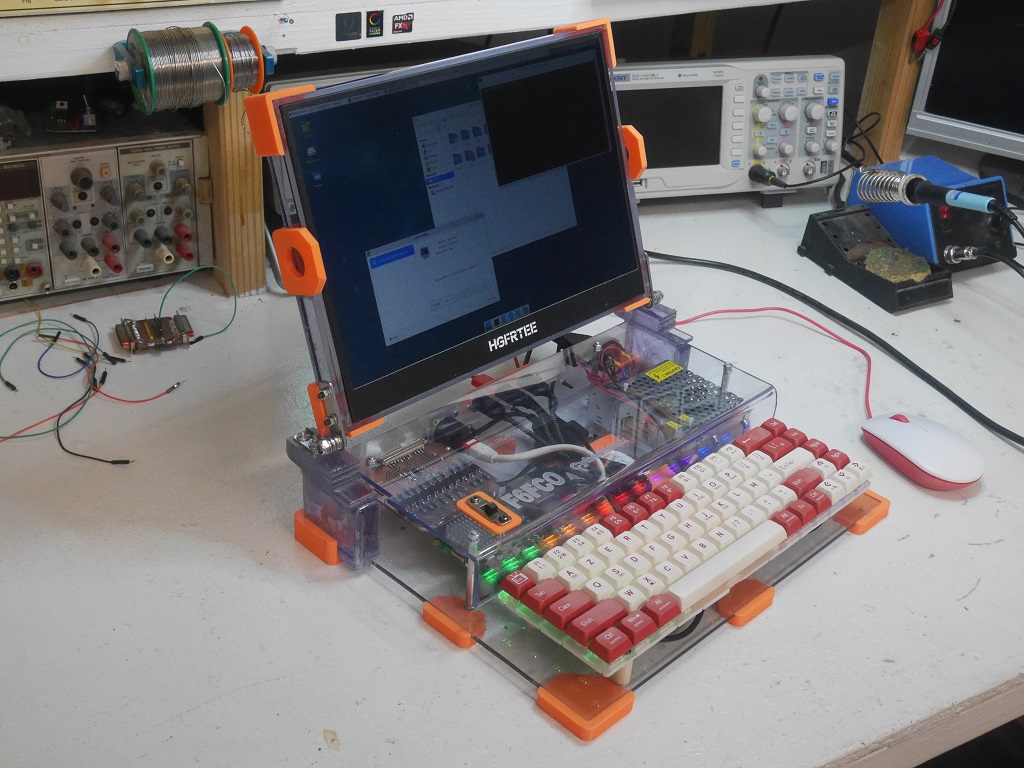
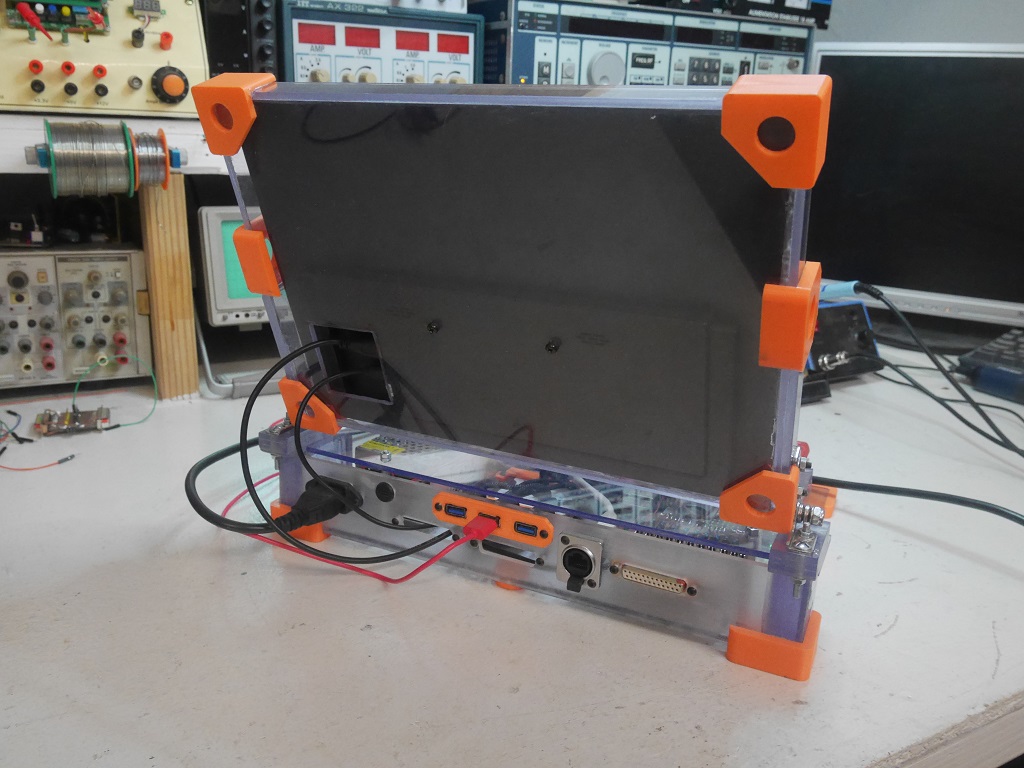
La réalisation finale, boitier en plexyglass, embarque un PI4 dont le GPIO communique avec l'extérieur via une carte optocouplée et sort sur DB25 pour rester compatible avec mon matériel existant, un DD 250Go prélevé sur un vieux pc portable, la face arrière est équipé de 3 prises USB, une RJ45, connecteur secteur, une sortie 5v et plusieurs découpes pour DB25 ultérieures, il faut toujours prévoir. Doté d'une alimentation 5v 5A car elle devra également assumer l'alim de l'écran, clavier et d'éventuels périphérique alimentés par les prises USB.
Panneau arrière: DB25, découpes pour futures DB25, RJ45, 3x USB, prise secteur, sortie 5vcc.
Pliable pour un transport confortable entre les différentes machines.