|
Frequenznormal von |
|
|
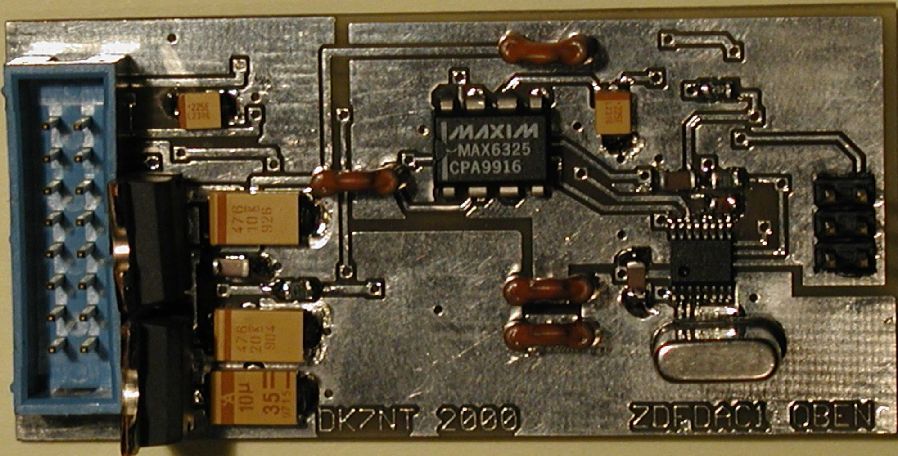
Die wichtigsten Elemente des CRO- Analogteils
(Bild 6) sind ein 20-Bit Digital-Analog-Converter (DAC) und eine
hochgenaue Spannungsreferenz. Viel Zeit wurde der Auswahl des
DACs gewidmet. Letztendlich kam ein sogenannter Delta-Sigma DAC
von Burr-Brown [7] zum Zuge. Er zeichnet sich durch sehr geringe
Leistungsaufnahme, gute Linearität und der Möglichkeit
der On-Chip Calibrierung aus. Er hat einen eingebauten Microprozessor
und benötigt deshalb einen Quarz. Nachteilig ist allerdings
dabei, daß es ihn nur in einem sogenanntem SSOP-Gehäuse
gibt, was selbst für SMD-Freunde eine Herausforderung beim
Löten bedeutet. Der Ausgang des DACs wird über einen
rauscharmen Operationsverstärker geführt und dann zum
Steuereingang des Oszillators geleitet, um dessen Frequenz elektronisch
nach zu stimmen. Dazu sollte eine möglichst kurze Leitung
benutzt werden. Es sollte auch im Normalbetrieb kein Spannungsmeßgerät
angeschlossen sein, da einmal die Auflösung normaler Meßgeräte
sowieso nicht ausreicht und andererseits so Störungen über
die Anschlußkabel „eingefangen“ werden können.
Zur ständigen Überwachung des CRO und zur Kontrolle der gewählten Einstellungen sind PC-Tools verfügbar, die alle wichtigen Informationen des CROs in einer sinnvollen Weise dem Nutzer zugänglich machen. Normalerweise erscheinen alle Informationen auf der LCD-Anzeige, sofern diese angeschlossen ist. Sie ist aber nicht unbedingt nötig. Während des normalen Betriebes wird jede Sekunde ein Satz von Daten der wichtigsten Meßergebnisse über die RS232 Schnittstelle geschickt. Ist ein PC angeschlossen, so kann mit Hilfe des Programms CROCON.EXE eine Anzeige der Informationen auf dem Bildschirm erfolgen, so wie sie normalerweise auf der LCD-Anzeige erscheinen. Das Programm CROONLINE.EXE stellt die Daten simultan in aufbereiteter Form dar. Die Meßwerte werden hier graphisch und numerisch auf den Bildschirm projiziert. Gleichzeitig werden diverse Berechnung durchgeführt und die Ergebnisse ebenfalls dargestellt. Die vom CRO kommenden Datensätze werden zur Dokumentation in eine Datei geschrieben und zur späteren Auswertung mit dem Tool CROOFFLINE.EXE gespeichert. Das Datenformat ist rein binär, was einerseits eine kompakte Datei erzeugt und anderseits auch eine Auswertung mit anderen Statistik Tools erlaubt. Das Programm CROCON.EXE ist außerdem in der Lage sämtliche Voreinstellungen, alle sonstigen ermittelten Daten und die ermittelte Regelkennlinie zu dokumentieren. Darüber hinaus können diese Werte modifiziert und wieder zum CRO zurück geschrieben werden. Zur statistischen Auswertung der empfangenen GPS Satelliten dient das Program GPS2.EXE. Es verarbeitet die Anzahl der „sichtbaren“ Satelliten und dokumentiert wie lange, wie viel Satelliten sichtbar waren. Dies erlaubt Rückschlüsse über die Qualität von GPS als Referenz an einem bestimmten Standort. Die Programmierung des 8051 Derivates
erfolgt mit dem Tool FLIP.EXE, welches von Temic/Atmel bereitgestellt
wird. Die Tools sind auf der Homepage der Verfasser verfügbar
oder dort ist wenigsten der Hinweis zu finden, wo die Tools beschafft
werden können. Eine genaue Beschreibung der diversen Programme
ist als zusätzliche Datei vorhanden. Außerdem befinden
sich dort Bauanleitungen für geeignete GPS-und TV-Empfänger.
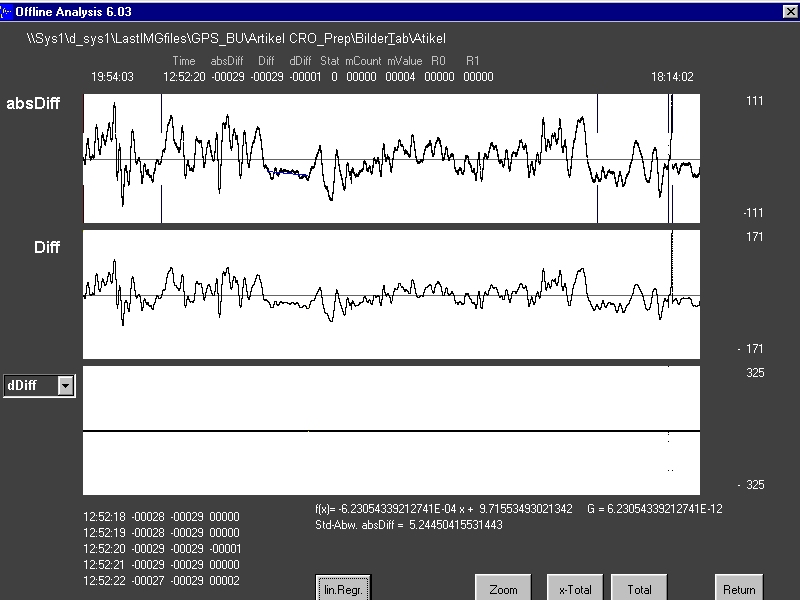
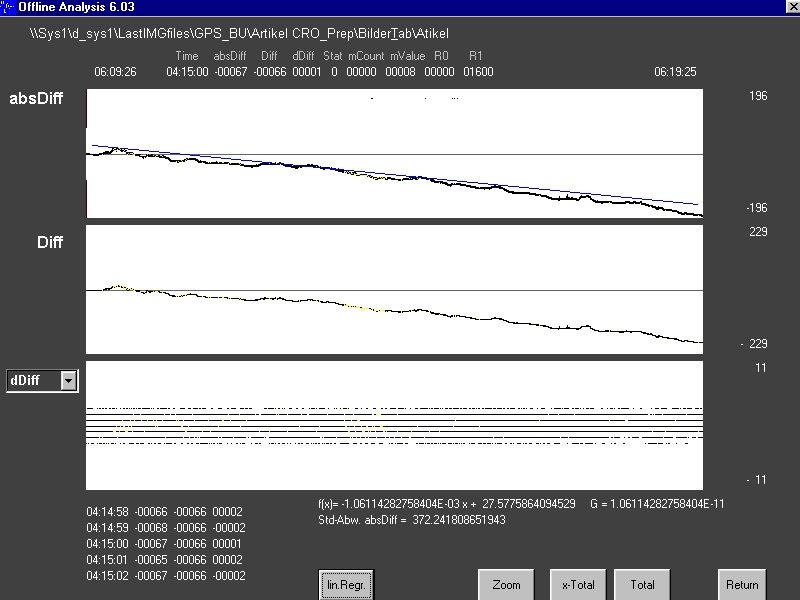
Ergebnisse Alle nachfolgenden Messungen wurden bei der heute üblichen Standardfrequenz von 10 MHz vorgenommen. Die Wirkungsweise des CRO`s als Meßgerät läßt sich an der Vermessung eines Rubidium Standards zeigen. Im Bild 7 ist die Aufzeichnung über 24 h gezeigt. Im oberen Graphen ist das Ergebnis der Phasenzählung durch den Kurvenverlauf angezeigt. Die Phasenwerte werden im 1 s Takt aufgezeichnet. Die eingefügte Gerade repräsentiert die relative Stabilität über 24 h, die hier –1.1*10exp-11 beträgt. Die relative Stabilität wird aus der linearen Regression gewonnen. Der Zeitabschnitt zur Regression kann individuell mit der Auswertesoftware gewählt werden. Im mittleren Feld ist die digital gefilterte Phasenzählung dargestellt. Im unteren Graph sind die Sekundenwerte der Phasenzählung repräsentiert. Klar zu erkennen ist die Streuung, die unter anderem durch den Phasenjitter bei der Korrelation im GPS Empfänger hervorgerufen wird.
Nach Abschluß der Arbeiten im
Standardfrequenzbereich mit 10 MHz sind wir dazu übergegangen
einen OCXO mit 126 MHz anzubinden. Denn unser zweites Projektziel
bestand in dem Wunsch Steueroszillatoren von Bakensendern und
Mikrowellen-Transvertern zu synchronisieren. Da das CRO Board
bis 130 MHz Eingangsfrequenzen akzeptiert und der Teilerfaktor
programmierbar ist, war auch dieses Experiment sehr erfolgreich.
Mit Stabilitäten von 10exp-10 machen wir derzeit Probebetrieb.
Endgültig sollen 10, 24, 47 und ggf. 76 GHz Baken wie beispielsweise
DB0FHR und DB0AS mit der GPS Synchronistion ausgestattet werden. Für den Nachbau ist an erster Stelle
ein GPS Empfänger mit einem präzisen
Der Nachbau der CRO Baugruppen zu privaten
Zwecken ist für Funkamateuere gestattet. Alle Schaltpläne
und die Software, auch Updates, sind im WWW auf der genannten
Homepage zu finden. Wer keinen Zugang zum Internet hat kann sich, mit einer leeren CD-ROM inklusive frankiertem und mit Adresse versehenen Rückumschlag, an folgende Adresse wenden:
Abschließend ist festzustellen,
daß das CRO Board die Stabilität guter OCXO`s um 1
bis maximal 2 Zehnerpotenzen verbessern kann. Die Grenze für
die verwendeten OCXO`s liegt um die 10exp-11für die relative
Stabilität im angebundenen Zustand. Das ist Rubidium Qualität.
Alle Umwelteffekte, Alterungseffekte und sogenannte Retrace-Problematiken
von lokalen Standards werden durch die Wir sind bemüht auch weitere Optimierungen des CRO`s durchzuführen. Das Neueste zum Thema kann man in der o.g. Home Page erfahren. Besonderen Dank möchten wir Alexander
Görich und Andreas Mangler (DD4IV), Helmut Rapp (DL1HEL)
und vielen Anderen für ihre Unterstützung bei der
Referenzen: [1] Fernseh- und Kino-Technik 48. Jahrgang
Nr.1-2/1994
|




{kind=link}
{kind=link}
{kind=link}