Frequenznormal
von
Dipl.-Ing. Günter König, DJ8CY
Dipl.-Ing. Robert Tyrakowski, DK7NT
Dr. rer. nat. Horst Schütze, DF7HSA
Dipl.-Ing. Klaus Osterschek, DB4MP[email protected]
Die Kenntnis
der genauen Frequenz ist ein Anspruch, den die Funk- und Meßtechnik
schon immer beschäftigte. Dieser Beitrag berichtet über
die Entwicklung eines hochgenauen, kontrollierten Referenzoszillators,
der die Frequenzgenauigkeit der eigenen Station und die von Bakensendern
deutlich verbessert. Das Ergebnis ermöglicht zudem die Vermessung
von Oszillatorstabilitäten und ist für denSelbstbau
geeignet. Als Frequenz- / Zeitnormal kann das Global Positioning
System (GPS) oder das ZDF/FBAS-Signal verwendet werden.
Übersicht und Motivation
In diesem Artikel beschreiben wir die
Funktionsweise und den Aufbau eines hochgenauen Referenzoszillators.
Obwohl nur mit Amateurmitteln aufgebaut, erreicht der hier beschriebene
Oszillator die Frequenzgenauigkeit und -konstanz eines Rubidiumnormals.
Bedarf für ein derartigen, frequenzstabilen
Oszillator gibt es nicht nur in der kommerziellen Funktechnik.
Auch in vielen Bereichen des Amateurfunks trifft man immer wieder
auf Anwendungen, die den Einsatz eines hochstabilen Referenzoszillators
erfordern. Die Giga-Hertz Amateure unter uns werden gleich zustimmend
nicken: Soll beispielsweise eine 10-GHz Bake ein Referenzsignal
abstrahlen, braucht diese einen äußerst
stabilen Primäroszillator. Aber nicht nur in den oberen
GHz-Bändern wird Frequenzgenauigkeit und -stabilität
gefordert. Die Genauigkeit eines
Frequenzzählers ist direkt abhängig von der Qualität
des verwendeten Referenzoszillators. Man darf sich also nicht
von der digitalen Frequenzanzeige eine Meßgenauigkeit vorgaukeln
lassen die oftmals nicht existiert. Die Genauigkeit der Frequenzmessung
wird ausschließlich von der Qualität des Referenzoszillators
bestimmt. Selbst im Kurzwellen- und Langwellenbereich (136 kHz)
sind für experimentelle Betriebsarten hochgenaue Oszillatoren
erforderlich. Das Ergebnis einer Dopplergramm Messung im Kurzwellenbereich,
wie von Peter Martinez, G3PLX vorgeschlagen [Ref.RadCom-g3plx]
hängt unmittelbar von der Frequenzstabilität des Empfängers
bzw. der verwendeten Oszillatoren ab [Eclipse99-df7yc].Die aufkommenden
Versuche, den Atlantik auf 136 kHz zu überbrücken,
haben ebenfalls die Notwendigkeit für hochgenaue Oszillatoren
aufkommen lassen. Die neue digitale Betriebsart WOLF (Weak signal
Operation for Low Frequencies) [Ref.RadCom, Juni 2001, Seite
31], von Jim Moritz, M0BMU entwickelt, ist am effizientesten
wenn die Frequenzabweichung kleiner als 0,003 Hz ist.
Der in unserem Artikel beschriebene Oszillator weist eine relative Frequenzgenauigkeit von 5*10exp-11auf. Für eine Referenzfrequenz von 10 MHz heißt das, daß die maximale Abweichung 0,0005 Hz sein kann ! Das ist in der Tat die Frequenzstabilität eines Rubidiumnormals.
Wie funktioniert nun unsere Regelelektronik und wie konnten wir diese Frequenzgenauigkeit erreichen ? Das Funktionsprinzip des Oszillators ist relativ einfach zu verstehen: Die Frequenz eines guten Oszillators (ofenstabilisierter Quarzoszillator) wird gemessen und mit einer hochpräzisen und zuverlässig verfügbaren Referenz verglichen. Driftet der Oszillator, so wird er durch eine Vergleichselektronik nachgeregelt. Das Referenzsignal wird entweder durch das weltweit verfügbare GPS-System oder alternativ durch das Zweite Deutsche Fernsehen (ZDF) geliefert. Bei Verwendung des GPS-Signals wird der 1PPS Impuls als Referenzsignal benutzt, während bei Verwendung des ZDF das Bildsynchronisationssignal die Referenz bildet.
Kenndaten
Die Stabilität der Oszillatorfrequenz
läßt sich vom Absolutwert bzw. seiner Abweichung df zum
Referenzwert f bei Vergleich mit einem Frequenz-/Zeitnormal ableiten.
Üblicherweise bildet man aus dem Quotienten df/ f
die relative Stabilität der Oszillatorfrequenz. Diese Darstellung
ist unabhängig von der Ausgangsfrequenz der Frequenzaufbereitung
und erlaubt eine schnelle Bewertung bezogen auf die Endfrequenz.
Beispielsweise besitzt ein Oszillator einer 24 GHz Bake ein df/ f
von 1*10exp-7 im schlechtesten Fall. Dies führt zu einer
Frequenzabweichung von etwa df =2,419 kHz auf 24192,900 MHz. Dies kann bei der
Suche einer solchen Bake mit dem DSP innerhalb einer SSB Bandbreite
schon zu einem Problem werden.
Die Abweichung des Oszillators ist abhängig
vom physikalischen Prinzip. Sie unterliegt in der Regel den Umweltbedingungen
wie Temperatur, Druck, magnetischen Feldern etc. und ist einer
Alterung unterworfen. Um nun zu einer verläßlichen
Aussage bzgl. der oben verwendeten Oszillatorstabilität
zu kommen ist der Zugang zu einem Frequenz- bzw. Zeitnormal unumgänglich.
Der Begriff >>Frequenznormal<<
ist in der Meßtechnik so definiert, daß das Ausgangssignal
einer Wechselspannung mit konstanter, durch Umgebungseinflüsse
kaum beeinflußbare Periodendauer entspricht. Man unterscheidet
sekundäre und primäre Frequenznormale. Der Absolutwert
der Frequenz wird bei primären Normalen ausschließlich
aus physikalischen Zusammenhängen berechnet und bedarf keiner
Einstellung im Hinblick auf die Ausgangsfrequenz. Beim sekundären
Frequenznormal wird die absolute Frequenz durch Vergleich mit
einem primären Normal auf die Endfrequenz gebracht. Das
sekundäre Normal liefert dann innerhalb eines engen Toleranzbereichs
seine Frequenz mit hoher Genauigkeit, die aber von Umgebungs-
und Alterungseinflüssen abhängigist. Eine zyklische
Kalibrierung von sekundären Standards ist unabdingbar. Zur
Charakterisierung von Oszillatoren wird unter anderem auch noch
zwischen der sog. Langzeit- und Kurzeitstabilität unterschieden.
Die Langzeitstabilität ist kurz gesagt die Ganggenauigkeit
über einen längeren Zeitraum (typisch 10exp-5 s). Die
Kurzzeitstabilität wird zur Charakterisierung über
einen bestimmten Zeitabschnitt angegeben. Wobei der Beobachtungszeitraum
typisch zwischen 1 und 1000 Sekunden liegt und grundsätzlich
mit angegeben werden muß. Aus einer Vielzahl von Kurzzeitstabilitätsmessungen
lassen sich mit Hilfe der sog. Allan Varianz Aussagen zu allen
Rausch-und Driftprozessen versus Zeit an Präzisionsoszillatoren
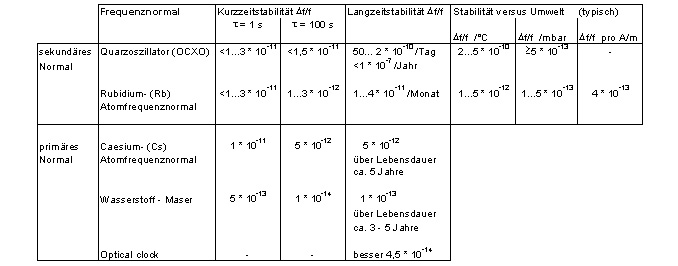
machen. Ein kurzer Vergleich in Tabelle 1 zeigt zwischen dem
wirtschaftlichsten Prinzip, dem thermisch stabilisieren Quarzoszillator
über Atomnormale die erreichbaren Stabilitäten. Moderne
Verfahren aus der Lasertechnik unter den Stichworten „laser
cooling“ und „optical clocks“ erreichen relative
Stabilitäten von 10exp-14. Beispielsweise wird auf der Basis
von Magnesium 4,5*10exp-14 erreicht.
Tabelle 1: Frequenznormale in der Übersicht.
CRO Eigenschaften
Wenn auch mittlerweile Rb- und Cs- Atomnormale
für den Funkamateur in greifbare Nähe gerückt
sind, so haben wir versucht mit unserem Beitrag eine günstigere
Lösung anzubieten. Im Vordergrund stand dabei das Ziel Stabilitäten
im Bereich des Rubidium-Normals zu erreichen.
Das Ergebnis ist der „Controlled Reference
Oscillator“ (CRO). Das Kernstück ist der digitale Phasenzähler,
der wie folgt verwendet werden kann:
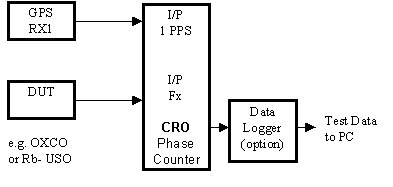
- Meßgerät ohne Oszillatorregelung zur Bewertung von thermischen Eigenschaften, Stabilitäten und Betriebsverhalten von Oszillatoren bis 130 MHz (Bild 1).
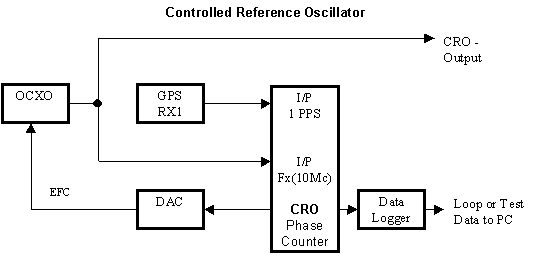
- Frequenzregelschleife zur Anbindung von Oszillatoren aller Art bis 130 MHz an ein hochgenaues Referenzsignal (Bild 2).
Folgende Referenzsignale können dazu verwendet werden:
- GPS, 1 PPS – Puls
- ZDF, FBAS – Signal
- Sonstige Referenzen auf 1 PPS Basis mit asymetrischem Tastverhältnis.
Bild 1: Vereinfachtes Blockdiagramm Frequenzregelschleife
Bild 2: Vereinfachtes Blockdiagramm Frequenzregelschleife
Messprinzip
Das Meßverfahren, das dem CRO
zugrunde liegt, ist seit langem bekannt und wurde unter anderem
1994 in einer Publikation der Physikalisch Technischen Bundesanstalt
(PTB) beschrieben [1] . Diese Beschreibung erfaßt zwar
in erster Line die Nutzung des ZDF TV-Signals als Referenz, das
Meßverfahren selbst kann aber genauso auf das 1 PPS Signal
von GPS-Empfängern oder anderen
vergleichbaren Signalen angewendet werden.
Das Meßprinzip ist in Bild 3 dargestellt und basiert darauf,
daß ein Zähler (Phasenzähler) mit z.B. 100
MHz den Abstand zwischen zwei Flanken auszählt.
Die erste Flanke öffnet das Tor des Zählers, der Phasenzähler
beginnt mit 100 MHz zu zählen, die zweite Flanke schließt
das Tor des Zählers wieder, der Zähler stopt. Wenn
er vorher gelöscht war, enthält der Zähler nun
einen Wert, der dem zeitlichen Abstand beider Flanken mit +/-10
ns Auflösung entspricht. Im Fall des CROs wird die erste
Flanke zum Öffnen des Phasenzählers aus der Frequenz
des zu messenden Oszillators erzeugt. Dazu wird die Oszillatorfrequenz
(fx) mit Hilfe eines Teilers (fx-Teiler) auf 1Hz herunter geteilt.
Die zweite Flanke zum Schließen des Tores ist entweder
das 1 PPS Signal eines GPS-Empfängers oder das VSYNC-Signal
extrahiert aus dem FBAS-Signal eines TV-Tuners. Dabei spielt
es keine Rolle, daß das VSYNC-Signal 50 mal häufiger
auftritt als das 1 PPS Signal. Entscheidend ist jeweils nur die
nächste Flanke des 1 PPS- oder VSYNC-Signals nach dem Öffnen
der Torschaltung durch die erste Flanke.
Da der Phasenzähler nicht beliebig lang sein kann (hier
22 bit mit Dynamikbereich 16 bit), sorgt ein Synchronisations-
mechanismus dafür, daß der Abstand zwischen beiden
Flanken nur so groß ist, daß der Phasenzähler
nicht überläuft.
Bleibt der Abstand beider Flanken 100 prozentig
gleich, enthält der Phasenzähler von Messung zu Messung
immer den gleichen Wert. Nur der Jitter beider Flanken kann dabei
kleine Differenzen des Ergebnisses hervorrufen, die aber über
die Zeit gemittelt, verschwinden. Bleibt der Phasenzählerwert
also quasi immer gleich, sind beide Frequenzen gleich. Wird der
Abstand beider Flanken von Messung zu Messung kleiner, wird auch
der Phasenzählerwert kleiner. Das bedeutet, daß nun
fx eine kleinere Frequenz hat als die Referenzfrequenz. Wird
der Abstand beider Flanken von Messung zu Messung größer,
wird auch der Phasenzählerwert größer.
Das bedeutet, daß fx eine höhere Frequenz hat als
die Referenzfrequenz. Der Absolutwert
des Phasenzählers bzgl. einer Messung ist ohne Bedeutung.
Nur die Differenz des Meßwertes der aktuellen Messung zum
Meßwert der vorherigen Messung wird kontinuierlich addiert
und dargestellt. Die Darstellung kann mit Hilfe eines statistischen,
mathematischen Verfahrens der sog. Linearen Regression bewertet
werden. Das Ergebnis der Bewertung ist eine Gerade die einen
Mittelwert aller Meßergebnisse darstellt. Die Steigung
dieser Geraden ist ein Maß für die Differenz beider
Frequenzen. Daraus kann dann in geeigneter Weise eine Nachstellgröße
für die Regelschleife bestimmt werden.

Bild 3: Messprinzip
Baugruppen und Komponenten
Wie aus dem Blockschaltbild Bild 4 ersichtlich,
besteht der CRO aus mehreren Baugruppen. Hier sollen die beiden
wichtigsten Baugruppen wie der Digitalteil und der Analogteil
beschrieben werden. Es versteht sich, daß die Oszillatoren
die mit Hilfe des CROs nachgeregelt werden sollen, nicht selbst
Bestandteil des Projektes waren, sondern daß hier auf eine
weite Palette von kommerziell gefertigten oder selbst gebauten
Oszillatoren zurück gegriffen wurde, was auch wiederum ein
Vorteil für den Anwender ist.
Da bei der Nachstellung der Oszillatoren
mit sehr kleinen Änderungen einer analogen Spannung gearbeitet
wird (beim HP OCXO 10811 ergibt ein Spannungshub von 1 mV eine
Frequenzänderung von 1*10e-11), wurde aus Störsicherheitsgründen
eine Aufteilung in den Digitalteil und den Analogteil
gewählt. Der Digitalteil beinhaltet
mit einer Ausnahme, alle digitalen Komponenten des CROs. Der
Analogteil beinhaltet alle analogen Komponenten und kann räumlich
getrennt (nahe beim Oszillator) untergebracht werden. Die Spannungsversorgung
des Analogteils kann vom Netzteil des Oszillators aus erfolgen,
was eine Abschaltung des Digitalteils erlaubt, während der
Oszillator und der Analogteil ständig „weiterlaufen“.
Die Verbindung der beiden Baugruppen untereinander erfolgt über
eine serielle Schnittstelle.
Bild 4: CRO Baugruppen
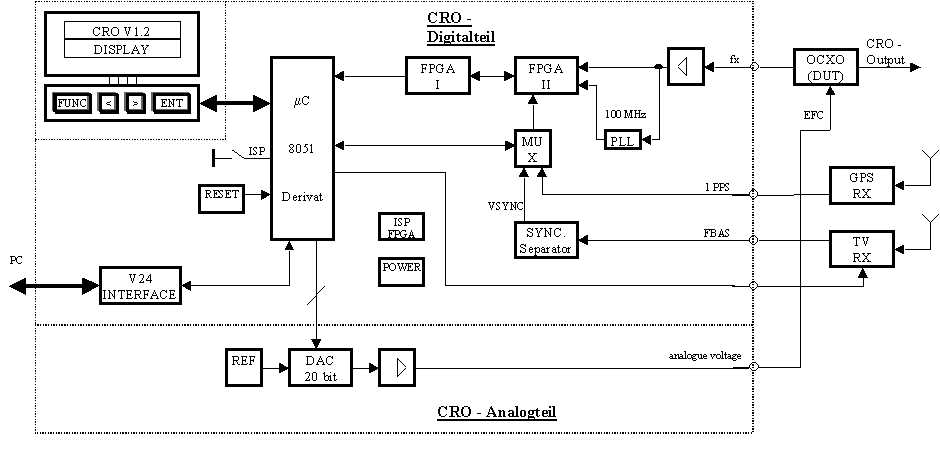
Digitalteil
Wenn das Referenzsignal und das Signal
des zu messenden Oszillators digitalisiert sind, kann die restliche
Meßwerterfassung, die Auswertung und die Berechnung des
Nachstellwertes bequem auf digitalem Wege erledigt werden. Die
Hauptarbeit des CRO Digitalteils (Bild 5) übernimmt dabei
ein Temic/Atmel Microcontroller [2], ein 8051 Derivat welches
ohne externen Programm- und Datenspeicher
auskommt und über eine „In System“ Programmiermöglichkeit
verfügt. Ein Reset-IC sorgt für sicheren Start nach
dem Anlegen der Versorgungsspannung, die mit einem Längsregler
stabilisiert wird und zwischen 7 und 12 Volt liegen kann. Die
Verbindung zur Außenwelt wird mit einer RS232 Schnittstelle
von Maxim [3] realisiert. Zur Bedienung ist ein Anschluß
für eine 2*16 Zeichen lange LCD-Anzeige und 4 Tasten vorhanden.
Alle wichtigen Daten z.B. Voreinstellungen etc. werden in einem
nicht flüchtigem EE-PROM gespeichert. Um den Aufwand an
externen Bauteilen so gering wie möglich zu halten, wurde
für die Realisierung der diversen Zähler und der restlichen
Logik sogenannte FPGAs (Field Programmable Gate Arrays) benutzt.
Die Inhalte der FPGAs von Altera [4] können mit einer kostenlosen
Entwicklungs-Software erstellt und mit einem sehr einfachem,
selbstgebautem Programmiergerät auf der Platine programmiert
werden. Dies ist eine äußerst effektive Methode Logik
jeglicher Art einfach zu realisieren. Alle schnellen Logikelemente
wurden in einem etwas teueren kleineren FPGA realisiert. Die
langsamere Logik ist in einem billigeren, größeren
FPGA untergebracht. Als Referenz können bekanntlich das
digitale 1 PPS Signal eines GPS Empfängers oder das VSYNC-Signal
eines TV-Receivers benutzt werden. Das 1 PPS-Signal wird direkt
der Torlogik des Phasenzählers zugeführt, das VSYNC
Signal muß hingegen aus dem FBAS-Signal gewonnen werden.
Dazu ist ein Impulsabtrenner der Firma Gennum [5] auf dem CRO-Board
integriert. Die Kanaleinstellung des TV-Tuners
kann natürlich auch direkt vom CRO aus erfolgen. Das Signal
des zu messenden Oszillators wird über zwei Verstärkerstufen
auf nahezu TTL-Pegel gebracht und dann dem Meßwerk zugeführt.
Ein spezielles PLL-IC von ICST [6] erzeugt aus der Frequenz des
Oszillators eine weitere Frequenz von annähernd
100 MHz. Diese ca. 100 MHz dienen dem Phasenzähler zum Ausmessen
der Start/Stop Flanken . Diese Methode hat gegenüber der
Verwendung von DIL-Oszillatoren den Vorteil, daß ein sehr
genaues 100 MHz Signal verfügbar ist, welches synchron zur
zu messenden Frequenz ist. Die absolute Frequenz spielt dabei
eine untergeordnete Rolle, da das Meßprinzip auf Zeitdifferenzen
innerhalb 1 bzw. 1/50 s basiert.
Drifteffekte eines DIL-Oszillators hingegen
würden sich im Ergebnis deutlich bemerkbar machen. Durch
die konsequente Benutzung von kompakten Bauelementen, konnte
eine relativ kleine , billige, doppelseitige Platine geschaffen
werden, die eigentlich nur eine Besonderheit aufweist. Bei der
Platzierung und der Leitungsführung des PLL-ICs wurde besonderer
Augenmerk darauf gerichtet, daß die PLL-Schaltung selbst
zur Verbesserung der Störsicherheit, möglichst vom
restlichen Digitalteil abgekoppelt ist. Der Digitalteil paßt
in ein Standard Weißblechgehäuse. Zur Herausführung
des Flachbandkabels für LCD Anzeige und Tasten wird einfach
das Blech an einer Seite beidseitig eingeschnitten und umgebogen.
Die restlichen Ein- und Ausgänge können mit Filterdurchführungen
ausgeführt werden. Die HF-Eingänge werden mit Teflondurchführungen
realisiert.
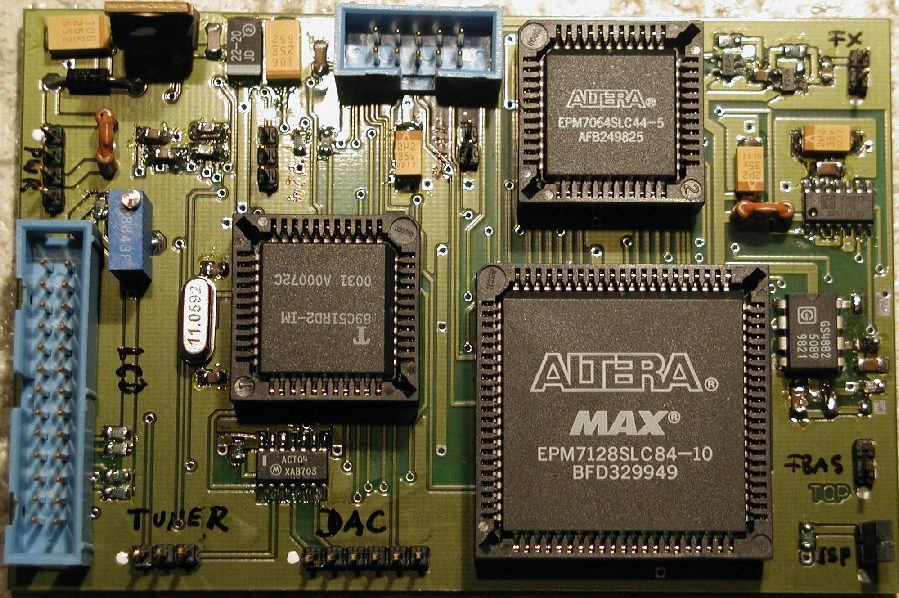
Bild 5: CRO Digitalteil