|
Yarp
|
| |
YARP ? What the heck is that supposed to mean?
Well, YARP is an acronym. It means "Yet another Roboter Project".
The name follows a long row of unnecessary, just for fun hobby projects.
Besides, it was a lot of fun chasing our cat Louis (male) in our flat with
YARP. Even my wife, who doesn't like me bothering Louis, was rotfl.
What is Yarp?
- YARP is my homebrew bot.
- It looks like a vehicle.
- It is 4 wheel driven (electrical motors). Attached to the motors are
1-speed transmissions.
- YARP is being controlled via an AX.25 wireless link.
- There is a CCD camera mounted on YARP.
- The camera is being moved by a stepper motor.
- The Amateur Television Transmitter sends video data to the Receiver on 13
cm Band (2.4 Gcs).
- On the back end of the wireless link there is a simple Terminal connected
to a Packet Radio Device, like a TNC.
- YARP is being controlled by a simple "language" defined while programming
YARP's application software.
The idea
I was inspired by a project from the days I went to the university (1992-1996).
I studied Electrics/Electronics. The initiative of one of or Professors lead
to project called "Motte". A Motte is an animal flying around lights
in the night. And this is what the Motte bot did. The bot followed a light
signal by its light sensitive sensors.
The special thing about Motte was its multitasking & real time OS. The
micro on Motte was a 68HC11 from Motorola. The OS was named "mops-OS".
The application software was designed following the real time implementation
model. Actually it took real(ly) time to compute all the data on the 68HC11.
Besides that it worked fine business.
When the years went by I remembered that project and decided to re-invent it.
But this time it should be much more powerful.
Inspired one more time by Sojourner, a mars robot, I projected YARP.
YARP is only fun. I just tried to re-activate my ideas from 1996 and do it
right this time (hi).
Capabilities
First I would like to mention:
This is no specification.
This is just a brief list of features and capabilities.
Normally (QRL) I would set up a specification 1st. But this is no QRL project
... (hi)
YARP has to have / is able to :
- powerful electrical power train, capable to carry (actually move) at least
10 lbs, I max per motor: 2 amps. Voltage 6 volts.
- Four wheel driven chassis, w/o suspension is O.K.
- go forward, back, right and left (2 dimensions)
- touch less obstacle recognition, based on super sonic sensors, 12 volt,
analogue output.
- reprogrammable control unit, ready for software updates. At least 16 I/Os,
8 ADs, 1 SCI, 1 beeper.
- wireless 2 way data link for remote control and telemetry data, using
standard ham radio equipment (e.g. TNC2) on board.
- AX.25 packet radio access. Minimum 1200 baud, AFSK, simplex.
- hand held on board radio, direct connected to wireless link modem (e.g.
TNC2)
- CCD-camera being mounted on a stepper motor, able to "see" in
the dark. 360 ° elongation. Infrared Beam.
- 13 cm ATV link to home base, I max 200 mA.
- run a least for 1h with full batteries.
- on-board diagnostics, fail safe. capable to measure every battery voltage and every DC motor current. Trouble codes in non
volatile memory.
- easy remote control language, using only small bandwidth.
- act like a data terminal.
- I/O controls for power train, CCD-camera
- on board Settings menu
I don't care about:
- power consumption
- vehicle's velocity
- design & look
- price
- usage of "not-invented-here" components
Nice to have:
- CCD-camera 360 ° elevation
- color CCD (ATV can color)
- on the fly software update on control unit
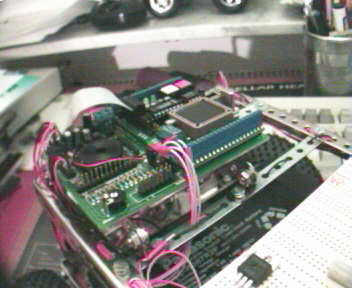
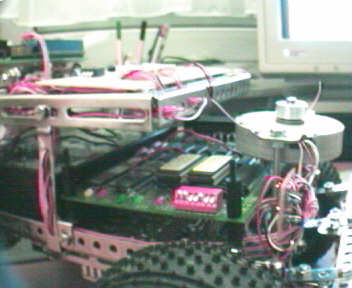
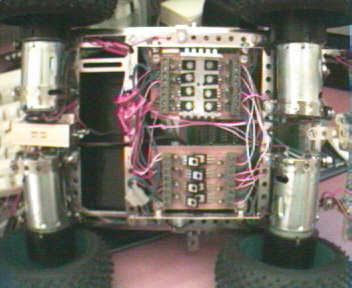
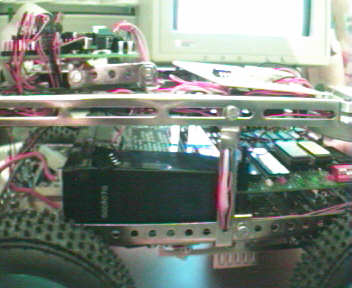
Pictures


Souce Code
|
This source code has been written in C-Control-I-Basic.
Please refer to C-Control-I Documentation.
Since the project is still on-going the day I wrote this HTML-Site,
the Source-Code may be out dated.
Please try to find the latest version in the Download Section.
'********************************************************************
'
' C-Control/BASIC yarp v01.bas
'
' Systemvoraussetzungen:
'
' - Application Board
' - YARP Aufbau (4 E-Motoren, 4 Transistoren-H-Bruecken, 3
Ultraschall-Sensoren
' - diese Software
' - 6 Volt Akku fuer E-Motoren
' - 7,2 Volt Akku für Steuerung + externe Verbraucher
' - TNC2 Modem
' - Funkgerät
'********************************************************************
define schrittmotor_port BYTEPORT [2]
schrittmotor_port = &H00 ' schrittmotor port wird null gesetzt. muss
solange als erstes kommen, wie kein pull down an den ausgängen
vorhanden ist.
define pts_buffer_left byte
define pts_buffer_right byte
define ser_in_byte byte
define zaehler byte
define akkuzaehler byte
define schritt_anzahl word
define setting_manuell_fahren bit[192]
define exit_bit bit [191]
define diagnose_mode_bit bit [190]
define akkudiagnose_ueberwachungs_bit bit [189]
define io_control bit [188]
define hupe bit [187]
define hindernis_umfahren bit [186]
define pts_sensor_left AD[2] ' linker ultraschallsensor
define pts_sensor_right AD[1] ' rechter ultraschallsensor
define e_motor_sum_current AD[3] 'summenstrom der e-motoren
define engine_akku_voltage AD[4] 'spannung des e-motoren-akkus, typ. 6
volt
define control_unit_voltage AD[5] ' spannung der steuerung, typ. 12 volt
'*** ASCII-Codes ***
define A_ &H41 : define B_ &H42 : define C_ &H43 : define D_
&H44 : define E_ &H45 : define F_ &H46 : define G_ &H47
: define H_ &H48 : define I_ &H49 : define J_ &H4A
define K_ &H4B : define L_ &H4C : define M_ &H4D : define N_
&H4E : define O_ &H4F : define P_ &H50 : define Q_ &H51
: define R_ &H52 : define S_ &H53 : define T_ &H54
define U_ &H55 : define V_ &H56 : define W_ &H57 : define X_
&H58 : define Y_ &H59 : define Z_ &H5A
define command_ &H63
define null_ &H30 : define eins_ &H31 : define zwei_ &H32 :
define drei_ &H33 : define vier_ &H34 : define fuenf_ &H35 :
define sechs_ &H36 : define sieben_ &H37
define acht_ &H38 : define neun_ &H39
define klammer_auf_ &H28 : define klammer_zu_ &H29 : define
SLASH_ &H2F : define LEERZ &H20 : define MINUS &H2D : define
NULL &H30
define GLEICH &H3D : define PUNKT &H2E : define AUSRUFEZEICHEN
&H21
define ESC_ &H1B : define LF_ &H0A : define KLAMMERAFFE_
&H40
define STX_ &H02 : define ETX_ &H03 : define SYN_ &H16 :
define XON_ &H11 : define XOFF_ &H13
define CAN_ &H19 : define CR_ &H0D
'-------------------------
define p1 port[1]
define p2 port[2]
define p3 port[3]
define p4 port[4]
define p5 port[5]
define p6 port[6]
define p7 port[7]
define p8 port[8]
define motoren_port BYTEPORT [1]
define p9 port [9]
define p10 port [10]
define p11 port [11]
define p12 port [12]
' define schritt0 &B11110000
'define schritt1 &B00000101
'define schritt2 &B00001001
'define schritt3 &B00001010
'define schritt4 &B00000110
'---defines für schwellwerte
define unterstrom_einzelmotor 5 ' ist noch zu checken !
define ueberstrom_einzelmotor 100 ' ist noch zu checken !
define hindernis_schwelle 25
define fehlerton 568 : define fehlertonlaenge 40
define unterspannung_control_unit 100
define unterspannung_e_motoren 55
#init
BAUD R9600
beep 568,10,0 : beep 250,10,0 ' alive ton
'HANDSHAKE ON ' kann ggfs spaeter entfallen
gosub TNC_INIT ' TNC wird für 1k2 parameter geladen
gosub connect_host ' der host des yarps wird versucht direkt zu
connecten. wenn "via" benutzt werden soll, dann ist dies zu
codieren.
#init_vars
setting_manuell_fahren= -1 'fahrzeug fährt nicht los, bis in settings
manuell fahren auscodiert wurde
ser_in_byte = 250 'ser_in_byte wird mit 250 geladen, sodaß keine
falschen interpretationen gemacht werden.
diagnose_mode_bit = 0 'keine diagnose-ausgaben
akkudiagnose_ueberwachungs_bit = 0 'defaultmaessig keine akku-überwachung,
sollte später auf 1 gesetzt werden (final version)
io_control=0 'defaultmaessig ist io_control aus
hupe = 1 'default: hupe wird aktiviert bei hindernisserkennung
hindernis_umfahren = 1 'default: hindernis erkennen und abhngig von bit
setting_manuell_fahren umfahren oder nicht
#initausgabe
print "yarp: ?:>";:put CR_
#main_loop
gosub hindernis
goto RX : #return_RX
gosub akku_diagnose
gosub TX
goto main_loop
end
#RX
if RXD then get ser_in_byte else goto return_RX
if ser_in_byte <> C_ then goto return_RX
if RXD then get ser_in_byte else goto return_RX
if ser_in_byte > 64 AND ser_in_byte < 91 then ser_in_byte =
ser_in_byte - 65 else goto return_RX 'grossbuchstaben werden akzeptiert
on ser_in_byte gosub a,b,c,d,e,f,g,h,i,j,k,l,m,n,o,p,q,r,s,t,u,v,w,x,y,z
ser_in_byte = 250 'ser_in_byte wert auf ungültig setzen
goto return_RX
#a
return
#b
return
#c
return
#d
gosub diagnose
return
#e
return
#f
return
#g
return
#h
gosub hupe
return
#i 'I/O Controls
io_control = 1
gosub iocontrol
io_control = 0
return
#j
return
#k
return
#l
return
#m
return
#n
return
#o
return
#p
return
#q
return
#r
return
#s
gosub settings
return
#t
return
#u
return
#v
return
#w
return
#x
return
#y
return
#z
return
#TX
'put CR_
'print "yarp:"
'print "CS,...:?>"
return
#hupe
beep 600,20,10
beep 600,20,10
return
#iocontrol
if RXD then get ser_in_byte else return
if ser_in_byte < 65 OR ser_in_byte > 90 then return
if ser_in_byte = B_ AND setting_manuell_fahren= -1 then gosub
rueckwaerts
if ser_in_byte = F_ AND setting_manuell_fahren= -1 then gosub
vorwaerts_ohne_stop
if ser_in_byte = L_ AND setting_manuell_fahren= -1 then gosub links
if ser_in_byte = R_ AND setting_manuell_fahren= -1 then gosub rechts
if ser_in_byte = C_ then gosub io_control_schritt_motor
if ser_in_byte = S_ then gosub stop 'S wie stop
print "yarp: ?:>";:put CR_
return
#io_control_schritt_motor
print "<yarp>: Alle Maschinen Stop !";:put CR_
exit_bit = 0 ' das menu wird nicht verlassen, bevor das bit = 1 ist.
gosub stop
#loop_schritt_menu
print "Schrittmotor Menu:"
print "0. Menu verlassen (Exit)";:put CR_
print "1. Rechts Drehen";:put CR_
print "2. Links Drehen";:put CR_
print "?>"; : put CR_
#loop_schritt_abfrage 'warten bis ein gültiges byte empfangen wurde
if RXD then get ser_in_byte else goto loop_schritt_abfrage 'warten bis
ein byte empfangen wurde, dann abfrage, ob gültig
if ser_in_byte > 47 and ser_in_byte < 58 then ser_in_byte =
ser_in_byte - 48 else goto loop_schritt_abfrage
on ser_in_byte gosub
s_exit,schritt_motor_rechtsdrehen,schritt_motor_linksdrehen
if exit_bit = 0 then goto loop_schritt_menu 'solange dieses bit = 0 wird
im settingsmenu geblieben
ser_in_byte = 250
return
#schritt_motor_rechtsdrehen
if RXD then get ser_in_byte
print "Wieviel Schritte nach rechts (4..200)?";:put CR_
#schritt_motor_rechs_schritte_abfrage
print "?:>";:put CR_
input schritt_anzahl
if schritt_anzahl < 4 OR schritt_anzahl > 200 then goto
schritt_motor_rechs_schritte_abfrage
for zaehler = 1 to ((schritt_anzahl / 4) + (schritt_anzahl mod 4))
p9=0: p10=1: p11=0: p12=1 ' schritt 1
pause 1
p9=1: p10=0: p11=0: p12=1 ' schritt 2
pause 1
p9=1: p10=0: p11=1: p12=0 ' schritt 3
pause 1
p9=0: p10=1: p11=1: p12=0 ' schritt 4
pause 1
next
p9=0: p10=0: p11=0: p12=0 ' schritt 0
return
#schritt_motor_linksdrehen
if RXD then get ser_in_byte
print "Wieviel Schritte nach links (4..200)?";:put CR_
#schritt_motor_links_schritte_abfrage
print "?:>";:put CR_
input schritt_anzahl
if schritt_anzahl < 4 OR schritt_anzahl > 200 then goto
schritt_motor_links_schritte_abfrage
for zaehler = 1 to ((schritt_anzahl / 4) + (schritt_anzahl mod 4))
p9=0: p10=1: p11=1: p12=0 ' schritt 4
pause 1
p9=1: p10=0: p11=1: p12=0 ' schritt 3
pause 1
p9=1: p10=0: p11=0: p12=1 ' schritt 2
pause 1
p9=0: p10=1: p11=0: p12=1 ' schritt 1
pause 1
next
p9=0: p10=0: p11=0: p12=0 ' schritt 0
return
#diagnose
print "<yarp>: Alle Maschinen Stop !";:put CR_
diagnose_mode_bit = -1
gosub stop
ser_in_byte = 250
exit_bit = 0 ' das menu wird nicht verlassen, bevor das bit = 1 ist.
#loop_diagnose_menu
print "Diagnose Menu:"
print "0. Menu verlassen (Exit)","1. E-Motoren";:put
CR_
print "2. Ultra-Schall-Sensoren","3. Akkus";:put CR_
print "4. Video","5. TNC","6.
Fehlercodes";:put CR_
print "?>"; : put CR_
#loop_diagnose_abfrage 'warten bis ein gültiges byte empfangen wurde
if RXD then get ser_in_byte else goto loop_diagnose_abfrage 'warten bis
ein byte empfangen wurde, dann abfrage, ob gültig
if ser_in_byte > 47 and ser_in_byte < 58 then ser_in_byte =
ser_in_byte - 48 else goto loop_diagnose_abfrage
akkudiagnose_ueberwachungs_bit = -1 : akkuzaehler = 255 'falls
akkudiagnose ausgewaehlt wird
on ser_in_byte gosub
s_exit,e_motoren_diagnose,ultraschall_sensoren_diagnose,akku_diagnose
if exit_bit = 0 then goto loop_diagnose_menu 'solange dieses bit = 0
wird im settingsmenu geblieben
akkudiagnose_ueberwachungs_bit = 0 'falls akkudiagnose ausgewaehlt wird
return
#ultraschall_sensoren_diagnose
print "<yarp> Stelle Hindernis (30 cm breit) in 20 cm
Entfernung senkrecht";:put CR_
print " vor das Fahrzeug (v/h).";:put CR_
print " Wenn bereit, dann weiter mit <W>";:put CR_
#ultraschall_hinweis_bestaetigung_falsche_eingabe
if ser_in_byte <> CR_ then print ":?>";:put CR_
#ultraschall_hinweis_bestaetigung
if RXD then get ser_in_byte else goto ultraschall_hinweis_bestaetigung
if ser_in_byte <> W_ then goto
ultraschall_hinweis_bestaetigung_falsche_eingabe
if pts_sensor_right > hindernis_schwelle AND pts_sensor_left >
hindernis_schwelle then print "<yarp>
L:";pts_sensor_left;" R:";pts_sensor_right;" =>
Sensoren O.K !"; else print "L:";pts_sensor_left;"
R:";pts_sensor_right;" => Sensoren defekt !";
put CR_
return
#e_motoren_diagnose
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
pause 10
print "<yarp>: Starte Prüfsequenz der E-Motoren-Diagnose
...";:put CR_
p1=1
p2=0
p3=0
p4=0
pause 3
print "Strom vorne links:";e_motor_sum_current,
' pause 10
if e_motor_sum_current < unterstrom_einzelmotor OR
e_motor_sum_current > ueberstrom_einzelmotor then print
"Stromkreis Motor vorne links ist defekt !"; else print
"Stromkreis Motor vorne links ist O.K. !";
put CR_
p1=0
p2=1
p3=0
p4=0
pause 3
'steuere vorne_rechts an, alle anderen aus
print "Strom vorne rechts:";e_motor_sum_current,
' pause 10
if e_motor_sum_current < unterstrom_einzelmotor OR
e_motor_sum_current > ueberstrom_einzelmotor then print
"Stromkreis Motor vorne rechts ist defekt !"; else print
"Stromkreis Motor vorne rechts ist O.K. !";
put CR_
p1=0
p2=0
p3=1
p4=0
pause 3
'steuere hinten_links an, alle anderen aus
print "Strom hinten links:";e_motor_sum_current,
' pause 150
if e_motor_sum_current < unterstrom_einzelmotor OR
e_motor_sum_current > ueberstrom_einzelmotor then print
"Stromkreis Motor hinten links ist defekt !"; else print
"Stromkreis Motor hinten links ist O.K. !";
put CR_
p1=0
p2=0
p3=0
p4=1
pause 3
'steuere hinten_rechts an, alle anderen aus
print "Strom hinten rechts:";e_motor_sum_current,
' pause 10
if e_motor_sum_current < unterstrom_einzelmotor OR
e_motor_sum_current > ueberstrom_einzelmotor then print
"Stromkreis Motor hinten rechts ist defekt !"; else print
"Stromkreis Motor hinten rechts ist O.K. !";
put CR_
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
pause 10
return
#hindernis
if hindernis_umfahren = 0 then return
if setting_manuell_fahren = -1 AND (pts_sensor_left>hindernis_schwelle
OR pts_sensor_right>hindernis_schwelle) then gosub stop
if setting_manuell_fahren = 0 AND pts_sensor_left>hindernis_schwelle
then gosub hindernis_links_umfahren
if setting_manuell_fahren = 0 AND pts_sensor_right>hindernis_schwelle
then gosub hindernis_rechts_umfahren
return
#akku_diagnose
'return ' so lange AD-ports nicht beschaltet, danach return entfernen
akkuzaehler = akkuzaehler +1
if akkudiagnose_ueberwachungs_bit = 0 OR akkuzaehler <> 0 then
return
print "<yarp> Antrieb: ";engine_akku_voltage/10;".";engine_akku_voltage
mod 10;" Volt ; System: ";control_unit_voltage/10;".";control_unit_voltage
mod 10;" Volt ; Antriebstrom: ";((engine_akku_voltage -
e_motor_sum_current)-1) * 8;"00 mA";:put CR_
if engine_akku_voltage < unterspannung_e_motoren then gosub
engine_akku_voltage_warnmeldung
if control_unit_voltage < unterspannung_control_unit then gosub
control_unit_voltage_warnmeldung
return
#engine_akku_voltage_warnmeldung
if diagnose_mode_bit = -1 then print "<yarp>:
E-Motoren-Akkuspannung: ";engine_akku_voltage;"
Bordnetzspannung: ";control_unit_voltage
print "<yarp>: Alarm ! Antrieb-Unterspannung !";:put CR_
print "<yarp>: Alle Maschinen Stop !"; : put CR_
setting_manuell_fahren = 1
if diagnose_mode_bit = 0 then gosub stop
gosub wait_to_proceed
return
#control_unit_voltage_warnmeldung
print "<yarp>: Alarm ! System-Unterspannung !"; : put
CR_
print "<yarp>: Alle Maschinen Stop !"; : put CR_
setting_manuell_fahren = 1
gosub stop
gosub wait_to_proceed
return
#wait_to_proceed
print "<yarp>: Weiter mit <W>";:put CR_
#loop_wait_abfrage_falsche_eingabe
if ser_in_byte <> CR_ then print "?:>"; : put CR_
'wenn CR_ empfangen wurde, wird kein ? ausgegeben
#loop_wait_abfrage
if RXD then get ser_in_byte else goto loop_wait_abfrage
if ser_in_byte = W_ then ser_in_byte = 250 else goto
loop_wait_abfrage_falsche_eingabe
return
#settings
print "<yarp>: Alle Maschinen Stop !";:put CR_
gosub stop
exit_bit = 0 ' das menu wird nicht verlassen, bevor das bit = 1 ist.
#loop_settings_menu
print "Settings Menu:"
print "0. Dieses Menu verlassen (Exit)";:put CR_
print "1. Manuelles Fahren ein/aus : "; : if
setting_manuell_fahren = -1 then print "ist ein"; : if
setting_manuell_fahren = 0 then print "ist aus";:put CR_
print "2. Diagnose Mode ein/aus : "; : if diagnose_mode_bit =
-1 then print "ist ein" : if diagnose_mode_bit = 0 then print
"ist aus";:put CR_
print "3. Akku-Ueberwachung ein/aus : "; : if
akkudiagnose_ueberwachungs_bit = -1 then print "ist ein" : if
akkudiagnose_ueberwachungs_bit = 0 then print "ist aus";:put
CR_
print "?:>";: put CR_
#loop_settings_abfrage 'warten bis ein gültiges byte empfangen wurde
if RXD then get ser_in_byte else goto loop_settings_abfrage 'warten bis
ein byte empfangen wurde, dann abfrage, ob gültig
if ser_in_byte > 47 and ser_in_byte < 58 then ser_in_byte =
ser_in_byte - 48 else goto loop_settings_abfrage
on ser_in_byte gosub
s_exit,s_manuell_fahren,s_diagnose_mode,s_akkudiagnose
if exit_bit = 0 then goto loop_settings_menu 'solange dieses bit = 0
wird im settingsmenu geblieben
return
#s_diagnose_mode
diagnose_mode_bit = diagnose_mode_bit = 0
print "<yarp>: ";
if diagnose_mode_bit = -1 then print "Diagnose Mode ist nun
aktiv"; else print "Diagnose Mode ist nun inaktiv";
put CR_
return
#s_akkudiagnose
akkudiagnose_ueberwachungs_bit = akkudiagnose_ueberwachungs_bit = 0
print "<yarp>: ";
if akkudiagnose_ueberwachungs_bit = -1 then print "Akkudiagnose ist
nun aktiv"; else print "Akkudiagnose ist nun inaktiv";
put CR_
return
#s_exit
print "yarp: ?:>"; : put CR_
exit_bit = 1 ' settingsmenu bei naechster abfrage verlassen
return
#s_manuell_fahren
setting_manuell_fahren = setting_manuell_fahren = 0
print "<yarp>: ";
if setting_manuell_fahren = -1 then print "Manuell Fahren ist nun
aktiv"; else print "Manuell Fahren ist nun inaktiv";
put CR_
return
#analyse
return
#TNC_INIT
'wait CTS: put ESC_ : wait CTS:put E_ : put null_ : put CR_
put ESC_:print "E0";:put CR_
put ESC_:print "S0";:put CR_
put ESC_:print "IYARP";:put CR_
put ESC_:print "MN";:put CR_
put ESC_:print "T40";:put CR_
put ESC_:print "@T2150";:put CR_
'put ESC_:print "@T3500";:put CR_
put ESC_:print "O7";:put CR_
put ESC_:print "S1";:put CR_
return
#connect_host
'wait CTS: put ESC_ : put C_ : put D_ : put L_ : put drei_ : put S_ :
put J_ : put B_ : put CR_
put ESC_:print "CDL3SJB";:put CR_
return
#hindernis_links_umfahren
if hupe then gosub hupe
gosub rueckwaerts
pause 50
gosub rechts
pause 50
return
#hindernis_rechts_umfahren
if hupe then gosub hupe
gosub rueckwaerts
pause 50
gosub links
pause 50
return
#vorwaerts_ohne_stop
if RXD then input schritt_anzahl
if schritt_anzahl = 0 then schritt_anzahl = 1
'if then schritt_anzahl = 1
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
p5=0
p6=0
p7=0
p8=0
p1=1
p2=1
p3=1
p4=1
for zaehler = 1 to schritt_anzahl
pause 5
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then zaehler = schritt_anzahl
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then gosub stop
next
if schritt_anzahl > 1 then motoren_port = &H00
schritt_anzahl = 0
return
#vorwaerts_mit_stop
gosub stop
p1=1
p2=1
p3=1
p4=1
return
#rueckwaerts
' gosub stop
if RXD then input schritt_anzahl
if schritt_anzahl = 0 then schritt_anzahl = 1
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
p5=1
p6=1
p7=1
p8=1
for zaehler = 1 to schritt_anzahl
pause 5
' if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then zaehler = schritt_anzahl
' if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then gosub stop
next
if schritt_anzahl > 1 then motoren_port = &H00
schritt_anzahl = 0
return
#stop
'if setting_manuell_fahren = 0 AND (pts_sensor_left>hindernis_schwelle
OR pts_sensor_right>hindernis_schwelle) then print "<yarp>:
Hindernis während manuellem Fahren erkannt, Stop !";:put CR_
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
pause 10
return
#links
' gosub stop
if RXD then input schritt_anzahl
if schritt_anzahl = 0 then schritt_anzahl = 1
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
p1=1
p2=0
p3=0
p4=1
p5=1
p6=0
p7=1
p8=0
for zaehler = 1 to schritt_anzahl
pause 5
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then zaehler = schritt_anzahl
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then gosub stop
next
if schritt_anzahl > 1 then motoren_port = &H00
schritt_anzahl = 0
return
#rechts
if io_control then if RXD then input schritt_anzahl
if schritt_anzahl = 0 then schritt_anzahl = 1
' gosub stop
p1=0
p2=0
p3=0
p4=0
p5=0
p6=0
p7=0
p8=0
p1=0
p2=1
p3=1
p4=0
p5=0
p6=1
p7=0
p8=1
if io_control then for zaehler = 1 to schritt_anzahl
pause 5
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then zaehler = schritt_anzahl
if pts_sensor_left>hindernis_schwelle OR
pts_sensor_right>hindernis_schwelle then gosub stop
next
if schritt_anzahl > 1 then motoren_port = &H00
schritt_anzahl = 0
return
|
| |
|