Proizvodjač: Honeywell
Napon napajanja: 2.16...3.6 V
Izlazni signal: I2C interface
Opseg merenja: X & Y & Z osa -8...+8 gauss
Rezolucija merenja: 2 milli-gauss
Tačnost merenja: ±1° za kompas
Period merenja: 6 ms



Software in Assembler for PIC16F876, rutina se poziva kod starta
;---------------------------------------------------------------------
; Inicijalizacija HCM5883L
Init_HCM5883L
i2c_start
movlw 0x3C ;Module address WR (0x1E)
call i2c_send
movlw 0x00 ;address 0x00
call i2c_send
movlw 0x70 ;8-average, 15 Hz default, normal measurement
call i2c_send
movlw 0xA0 ;Gain=5 (440 LSb/Gauss)
call i2c_send
movlw 0x00 ;Continuous-measurement mode
call i2c_send
i2c_stop
return
;---------------------------------------------------------------------
Software in Assembler for PIC16F876, rutina se poziva svake sekunde
;---------------------------------------------------------------------
; Citaj podatke iz HCM5883L - Pravac vetra
HCM5883L
i2c_restart
movlw 0x3D ;Module address RD (0x1E)
call i2c_send
;- - - - - - - - - - - - - - - - - - - - - - - -
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 1
movwf WX_H
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 2
movwf WX_L
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 3
movwf WZ_H
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 4
movwf WZ_L
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 5
movwf WY_H
i2c_receive
i2c_send_NACK
movf SSPBUF,W ;uzmi podatak 6
movwf WY_L
i2c_stop
;- - - - - - - - - - - - - - - - - - - - - - - -
i2c_restart
movlw 0x3C ;Module address WR (0x1E)
call i2c_send
movlw 0x03 ;point to first data register 0x03
call i2c_send
i2c_stop
return
;---------------------------------------------------------------------
Download File:
hmc5883.py - Python software za testiranje HMC5883
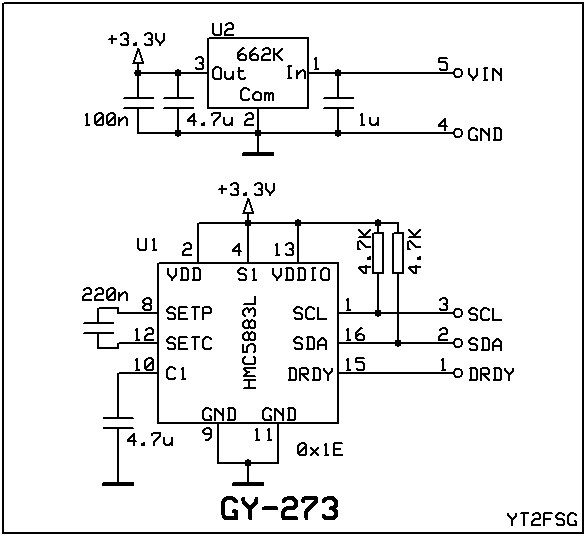
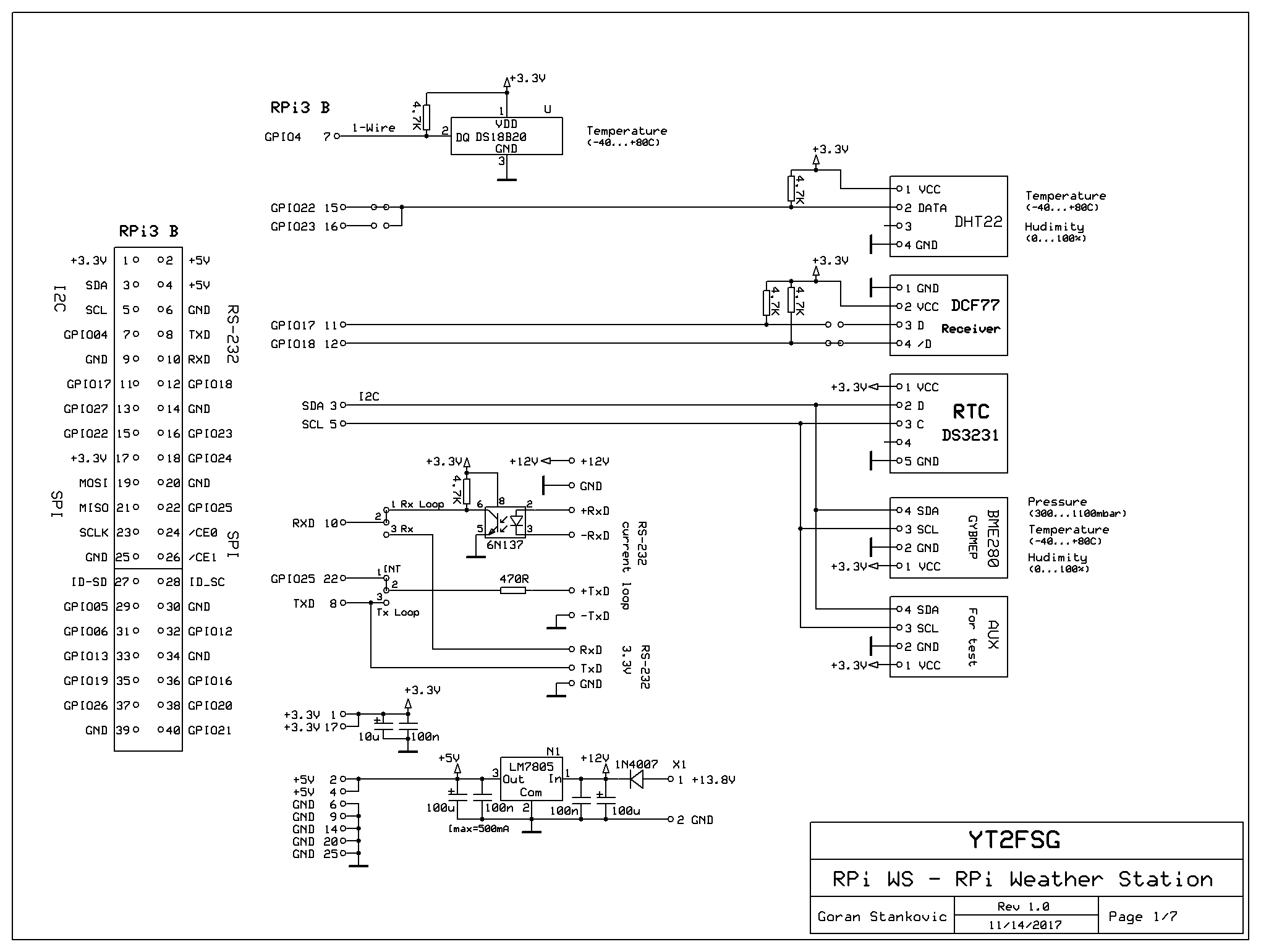
Šema RPI WS
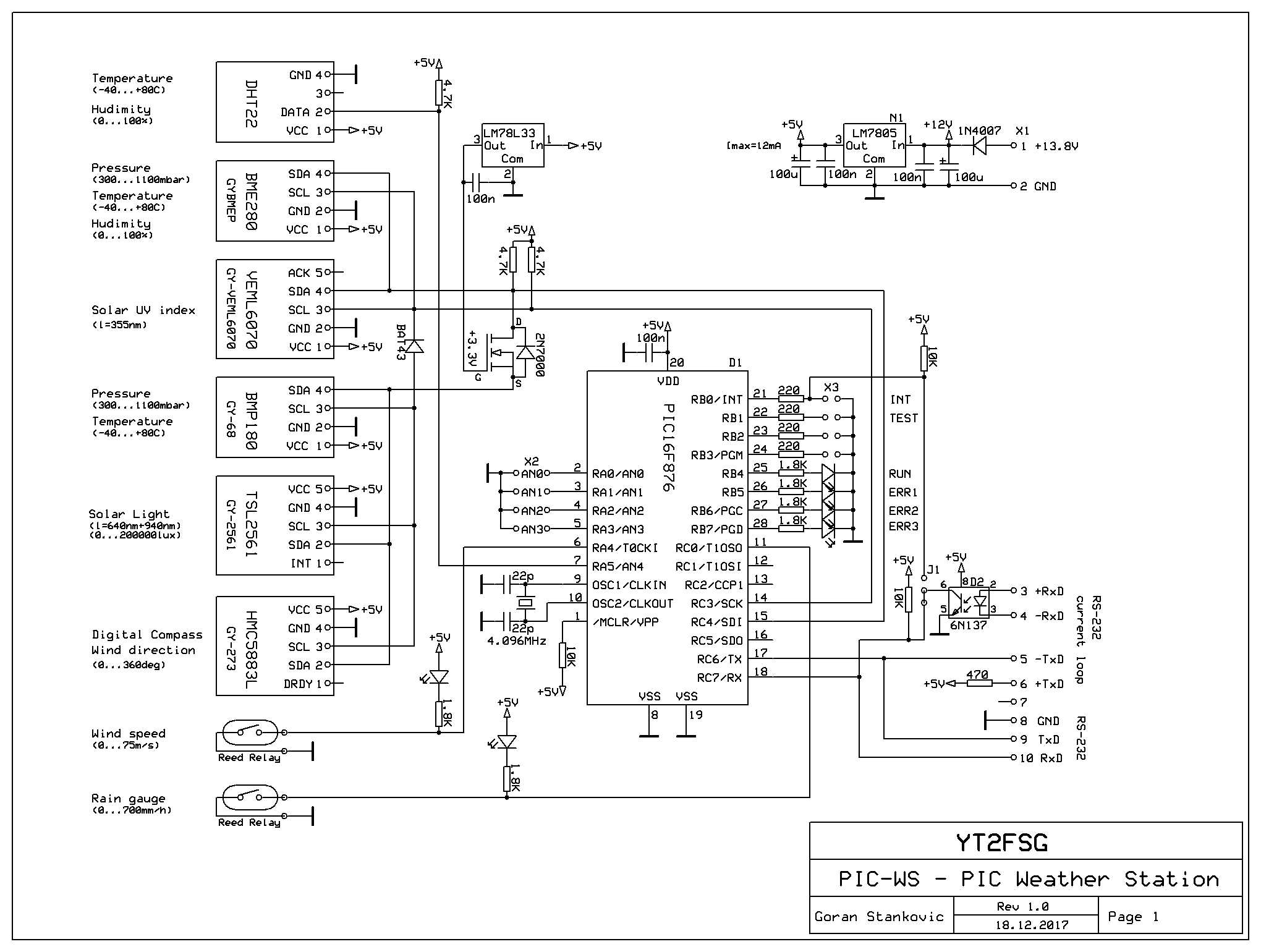
Šema PIC WS
Data Sheet - HMC5883L.pdf
Senzor: HMC5883L
Izlazni signal: I2C interface
Tačnost merenja: ±1°
Izradjen je od metala, moguće je dodati grejače za rad na niskim temperaturama.

Software in C++ for Raspberry Pi
//****************************************************************************
// Calculate values – Wind Direction – Pravac vetra
//****************************************************************************
#define wdeg_offset 0 // offset = -180...+180
...
// ----- Smer vetra (deg)
wx = hex_val2(buf[52],buf[53],buf[54],buf[55]);
wy = hex_val2(buf[56],buf[57],buf[58],buf[59]);
printf("(X=%d Y=%d) ",wx,wy);
// Offset racun
if(wx > xmax) { xmax = wx; }
if(wx < xmin) { xmin = wx; }
if(wy > ymax) { ymax = wy; }
if(wy < ymin) { ymin = wy; }
xoff = (xmax + xmin)/2;
yoff = (ymax + ymin)/2;
xo = wx - xoff;
yo = wy - yoff;
// Gain racun
xd = (xmax - xmin);
yd = (ymax - ymin);
if(xd > yd) { xgain = 1000; ygain = (xd * 1000) / yd ; }
else { xgain = (yd *1000) / xd ; ygain =1000; }
xo = (xo * xgain) / 1000;
yo = (yo * ygain) / 1000;
wdeg = atan_fast(xo,yo); // X osa pokazuje SEVER
// Deg offset racun
wdeg = wdeg + wdeg_offset;
if(wdeg >= 360) wdeg = wdeg -360;
if(wdeg < 0) wdeg = wdeg + 360;
printf("Wd=%3d' ",wdeg);
...
//----------------------------------------------------------------------
unsigned int atan_fast(signed int y, signed int x)
{
unsigned char negflag, tempdegree, comp;
unsigned int degree, ux, uy;
negflag=0;
if (x<0)
{
negflag+=0x01;
x=(0-x);
}
ux=x;
if (y<0)
{
negflag+=0x02;
y=(0-y);
}
uy=y;
if (ux>uy)
{
degree=(uy*45)/ux;
negflag+=0x10;
}
else
{
degree=(ux*45)/uy;
}
comp=0;
tempdegree=degree;
if(tempdegree > 22)
{
if(tempdegree <= 44) comp++;
if(tempdegree <= 41) comp++;
if(tempdegree <= 37) comp++;
if(tempdegree <= 32) comp++;
}
else
{
if(tempdegree >= 2) comp++;
if(tempdegree >= 6) comp++;
if(tempdegree >= 10) comp++;
if(tempdegree >= 15) comp++;
}
degree += comp;
if(negflag & 0x10) degree = (90-degree);
if(negflag & 0x02)
{
if(negflag & 0x01)
degree = (180 + degree);
else
degree = (180 - degree);
}
else
{
if(negflag & 0x01)
degree = (360 - degree);
}
return (degree);
}
//----------------------------------------------------------------------
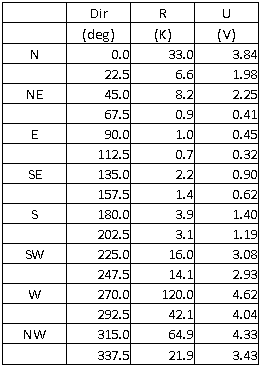
Pravac vetra - low cost sensor
Senzor: 8 x Reed relay
Izlazni signal: Analogni
Tacnost merenja: 360/16 = 22.5°
Izradjen je od plastike.




Link: www.philpot.me/weatherinsider.html

Download File:
Šema RPi WS
Šema PIC WS
{kind=link}
{kind=link}