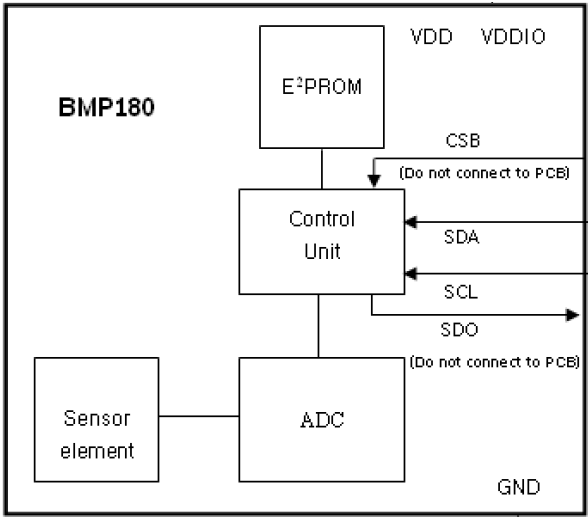
BMP180 - Senzor atmosferskog pritiska i temperature vazduha
Proizvodjač: BOSCH Sensortec
Napon napajanja: 1.8...3.6 V
Izlazni signal: I2C interface
Opseg merenja: pritisak 300...1100 hPa, temperatura -40 °C...+85 °C
Rezolucija merenja: pritisak 0.01 hPa, temperatura 0.1 °C
Tačnost merenja: pritisak ±1 hPa, temperatura ±0.5°C (±1°C)
Period merenja: pritisak 4.5...25.5 ms, tempetatura 4.5 ms



Software in C++ for Raspberry Pi
//****************************************************************************
// Calibration values - BMP180
//****************************************************************************
const unsigned char bmp_oversample = 3; // oss=3
// Pomocu: i2cdump -y 1 0x77, prepisati vrednosti od adrese 0xAA do 0xBF
// These are stored in the BMP180 // MSB, LSB
short int bmp_ac1 = 0x20C6; //0xAA,0xAB
short int bmp_ac2 = 0xFB20; //0xAC,0xAD
short int bmp_ac3 = 0xC742; //0xAE,0xAF
unsigned short int bmp_ac4 = 0x848D; //0xB0,0xB1
unsigned short int bmp_ac5 = 0x63C3; //0xB2,0xB3
unsigned short int bmp_ac6 = 0x43A1; //0xB4,0xB5
short int bmp_b1 = 0x1973; //0xB6,0xB7
short int bmp_b2 = 0x0034; //0xB8,0xB9
int bmp_b5;
short int bmp_mb = 0x8000; //0xBA,0xBB
short int bmp_mc = 0xD1F6; //0xBC,0xBD
short int bmp_md = 0x09BC; //0xBE,0xBF
//----------------------------------------------------------------------
...
// ----- Pritisak vazduha (mbar)
msb = hex_val(buf[18],buf[19]);
lsb = hex_val(buf[20],buf[21]);
bmp_b5 = bmp_b5_Get(msb,lsb);
msb = hex_val(buf[12],buf[13]);
lsb = hex_val(buf[14],buf[15]);
xsb = hex_val(buf[16],buf[17]);
p = (float)bmp_GetPressure(msb,lsb,xsb)/100;
printf("%5.0fmbar ",p);
// ----- Temperatura vazduha 2 (C)
t2 = ((float)((bmp_b5 + 8)>>4))/10;
printf("%5.1fC ",t2);
...
//----------------------------------------------------------------------
// Calculate calibrated pressure BMP180
// Value returned will be in hPa
int bmp_GetPressure(int msb, int lsb, int xsb)
{
unsigned int up;
int x1, x2, x3, b3, b6, p;
unsigned int b4, b7;
up = (((unsigned int) msb << 16) + ((unsigned int) lsb << 8) + ((unsigned int) xsb)) >> (8-bmp_oversample);
b6 = bmp_b5 - 4000;
x1 = (bmp_b2 * (b6 * b6)>>12)>>11;
x2 = (bmp_ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((int)bmp_ac1)*4 + x3)<>2;
x1 = (bmp_ac3 * b6)>>13;
x2 = (bmp_b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (bmp_ac4 * (unsigned int)(x3 + 32768))>>15;
b7 = ((unsigned int)(up - b3) * (50000>>bmp_oversample));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
p += (x1 + x2 + 3791)>>4;
return p;
}
//- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
// Calculate calibrated temperature BMP180
// Value returned will be in units of 0.1 deg C
int bmp_b5_Get(int msb, int lsb)
{
unsigned int ut;
int x1, x2;
// int t;
ut=((msb<<8)+lsb);
x1 = (((int)ut - (int)bmp_ac6)*(int)bmp_ac5) >> 15;
x2 = ((int)bmp_mc << 11)/(x1 + bmp_md);
bmp_b5 = x1 + x2;
// t = ((bmp_b5 + 8)>>4);
return bmp_b5;
}
//----------------------------------------------------------------------
Software in Assembler for PIC16F876, rutine se pozivaju svake sekunde sa pauzama
;---------------------------------------------------------------------
;Start BMP180 - Temperatura
Start_BMP180_T
i2c_start
movlw 0xEE ;Module address WR (0x77)
call i2c_send
movlw 0xF4 ;address
call i2c_send
movlw 0x2E ;Start Temperature, wait 4.5ms
call i2c_send
i2c_stop
return
;---------------------------------------------------------------------
...
Pauza veca od 4.5ms
;---------------------------------------------------------------------
;Citaj podatke iz BMP180 - Temperatura
BMP180_T
i2c_restart
movlw 0xEE ;Module address WR (0x77)
call i2c_send
movlw 0xF6 ;address
call i2c_send
;- - - - - - - - - - - - - - - - - - - - - - - -
i2c_restart
movlw 0xEF ;Module address RD (0x77)
call i2c_send
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 1
movwf T2_H
i2c_receive
i2c_send_NACK
movf SSPBUF,W ;uzmi podatak 2
movwf T2_L
i2c_stop
return
;---------------------------------------------------------------------
...
;---------------------------------------------------------------------
;Start BMP180 - Pritisak
Start_BMP180_P
i2c_start
movlw 0xEE ;Module address WR (0x77)
call i2c_send
movlw 0xF4 ;address
call i2c_send
; movlw 0x34 ;Start Pressure (oss=0) Max. conversion time 4.5ms
; movlw 0x74 ;Start Pressure (oss=1) Max. conversion time 7.5ms
; movlw 0xB4 ;Start Pressure (oss=2) Max. conversion time 13.5ms
movlw 0xF4 ;Start Pressure (oss=3) Max. conversion time 25.5ms
call i2c_send
i2c_stop
return
;---------------------------------------------------------------------
...
Pauza veca od 25.5ms
;---------------------------------------------------------------------
;Citaj podatke iz BMP180 - Pritisak
BMP180_P
i2c_restart
movlw 0xEE ;Module address WR (0x77)
call i2c_send
movlw 0xF6 ;address
call i2c_send
;- - - - - - - - - - - - - - - - - - - - - - - -
i2c_restart
movlw 0xEF ;Module address RD (0x77)
call i2c_send
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 1
movwf P_H
i2c_receive
i2c_send_ACK
movf SSPBUF,W ;uzmi podatak 2
movwf P_L
i2c_receive
i2c_send_NACK
movf SSPBUF,W ;uzmi podatak 3
movwf P_X
i2c_stop
return
;---------------------------------------------------------------------
Download File:
bmp180.py - Python software za testiranje BMP180
Šema RPI WS
Šema PIC WS
Data Sheet - BMP180.pdf