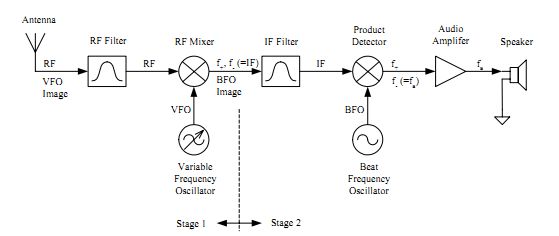
RF filtreden geçen radyo sinyalleri RF mikser katına gelir. İşte bizim superheterodyne tekniği tam olarak burada kendini göstermeye başlayacaktır. Alıcı ve vericilerimizde çok farklı frekansta sinyallerle çalışmak zorunda kalırız ve bu elektronik olarak pek çok problemi beraberinde getirir. Fakat eğer çok yüksek olmayan sabit bir frekansı kullanırsak yükseltme filtreleme v.b. pek çok işlemi daha kolay ve etkili gerçekleştirebiliriz.
Adı geçen bu frekansı intermediate frekans (IF) yani ara frekans olarak adlandırıyoruz. RF mikserimize gelen radyo sinyalleri ve altta gördüğümüz lokal osilatör tarafından üretilen sinyalle karıştırılır. Bu karışım sonucunda çıkışta iki farklı sinyal elde ederiz (fRF + fLO ve fRF - fLO). Yani iki frekansın toplamı ve farkı olan sinyaller. Bunlardan biz fark sinyalini kullanırız bu nedenle toplam sinyalini uygun bir filtre ile bastırırız. Peki ara frekansımız sürekli nasıl sabit kalır? Bunu sağlayan lokal osilatörümüzün ürettiği sinyalin frekansının değişiyor olmasıdır. Örneğin öncelikle 7.120 Mhz frekansında bulunan bir istasyonu dinlemek isteyelim seçtiğimiz ara frekans (IF) değerimizde 1.000 Mhz olsun. Biz alıcımızı ayarlarken (tune ederken) aslında lokal osilatörümüzü ayarlarız ve bu durumda fLO = 6.120 Mhz sinyal üretir ve 7.120 - 6.120 = 1.000 Mhz ara frekansta sinyalimizi değiştirmiş oluruz. Unutulmaması gereken bir konu gelen sinyalin içeriğindeki bilginin (ses, veri v.s.) değişmediği sadece taşıyıcının frekansının değiştiğidir. Eğer bu alıcımızla 7.282 Mhz de bulunan bir istasyonu dinlemek isteseydik bu sefer lokal osilatörümüz 6.282 Mhz bir sinyal üretecekti. Böylece dinlediğimiz istasyon hangi frekansta yayın yaparsa yapsın onu sabit bir IF frekansına indirgemiş oluyoruz. Artık işimiz daha kolay, sabit IF ara frekansını verimli bir şekilde yükseltebiliriz ve onun dışındaki istenmeyen sinyalleri çok keskin bir şekilde bant geçiren filtrelerle filtreleyebiliriz. Buraya kadar anlatılan bu yöntem superheterodyne olarak bilinmektedir.
Blok şemamıza geri dönersek IF filtre katından sonra dedektör kısmı yani taşıyıcının ilettiği bilginin (radyo alıcıları için ses) ayrıştırıldığı kat görülmektedir. Bu kısım yine bir heterodyne alıcıdır ve burada ara frekansımız olan IF bir BFO (vuru osilatörü) ‘dan gelen sinyalle karıştırılır. Bu karışımın ürünü ise artık insan kulağının duyacağı seviyeye (20 ile 20000 Hz) indirgenmiş ses sinyalidir. Devamında bu ses (audio) sinyali hoparlör v.s. sürülmek için uygun bir yükselticide (Audio Amplifier) yükseltilir.
Hoparlör yerine mikrofon olduğunu ve ses dalgalarının mikrofon aracılığıyla elektrik sinyallerine dönüştürüldüğünü düşünürsek bu sistemi verici olarak çalıştırmak için gerekli tek şey süreci uygun şekilde ters çevirmektir.
Buraya
kadar genel olarak superhetrodyne alıcılarına bir göz attık. Daha
ayrıntılı bilgi için (örneğin karıştırıcıdaki doğrusal olmayan
elemanlar ve
matematiksel teorisi, filtre yapıları ve BFO için internette ayrıntılı
kaynaklar mevcut). Bu yazıyı hazırlarken Türkçe kaynak var mı diye
araştırdığımda
karşılaştığım ve yine zevkle okuduğum merhum TA3BQ Özhan Bey’in
“HETERODİN VE
SÜPERHETERODİN ALICILAR “ yazısını tavsiye eder ve bir süre önce
kaybettiğimiz
değerli üstadı tekrar saygıyla anarım.
Şimdi Forty II için katları ele almaya başlarsak,
Board 1
Burada şemanın hemen sol alt tarafında anten bağlantımız görülmekte. Anten girişimizi sinyalimizin ilk filtrelemesini yapan C1, C2, C3, L1, L2 elamanları izliyor. Bu elemanlar alçak geçiren bir filtre oluşturuyor. (Burada L bobin değerleri verilmemiş eğer onları elde edebilirsem hesaplanmış filtreleme frekansları buraya eklenecek) .
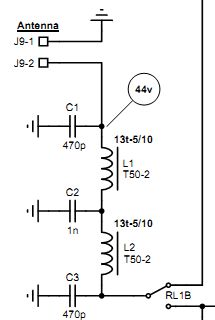 |
Buradan sonra PTT ile kontrol edilen rölenin RL1B kontağına geliyoruz. PTT basılı değilken yani cihaz alma konumunda iken bağlantı yandaki şekildeki gibi. |
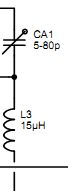 |
Daha sonra ilk eşlenik filtremizi oluşturan L3 bobini ve CA1 ayarlı kondansatörü geliyor. Hesapladığımızda bu filtrenin ayarlı CA1 kondansatörünün değerine göre 18,4 Mhz (5 pF için) ve 4,59 Mhz (80 pF için) arasında rezonans frekanslarına sahip olduğu yani bu aralıkta seçilen frekansları geçirdiği görülüyor. |
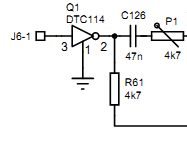 |
Devam ettiğimizde güçlü sinyaller için zayıflatma (ATTN) bölümünü görüyoruz. PIC16F84 mikro kontrolcü tarafından (J 6-1 ucu) kontrol edilen ve hızlı anahtarlama özelliğine sahip Q1 DTC114 transistoru bu zayıflatma işlemini gerçekleştiriyor. |
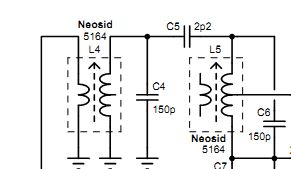 |
Bu bölümde ise mikser entegresi öncesi son filtreleme kısmı var. L4, C4 ve L5, C6 filtreleri C5 kondansatörü ile zayıf bir şekilde kuple edilmiş yani bağlanmış. |
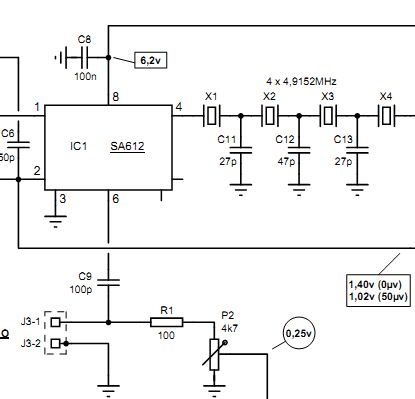 |
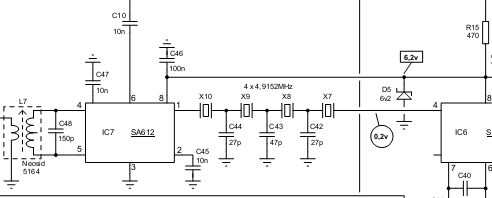
Yandaki bölümde ise IC1 yani mikser ve osilatör bir arada olan SA612 (veya NE612) entegremiz görülüyor. Antenden gelen ve filtrelerden geçen radyo sinyalimiz entegremizin 1 ve 2 numaralı uçlarından girilmiş. 4 ve 5 numaralı uçlardan ise IF yani ara frekans sinyalimiz çıkıyor. Görüldüğü gibi IF ara frekans değeri olarak 4,9125 MHz değeri seçilmiş. Bu ara frekans değerini elde etmemizi sağlayan lokal osilatör girişi ise C9 kondansatörü üzerinden ve entegrenin 6 numaralı ucundan sağlanıyor. Lokal osilatörümüz Bord2a üzerinde ve bağlantısı J3-1 ve J3-2 üzerinden yapılmış. Entegrenin çıkışında IF filtre olarak 4 adet eş 4,1925 MHz kristalden ve 3 kondansatörden oluşan kuartz merdiven filtre kullanılmış. Chebyshev tip olarak tasarlanan bu filtrenin bant genişliğinin 4 kHz (-6dB) ve dalgalanmasının (ripple) oldukça düşük olduğu belirtilmiş. Şemanın sağında yer alan 13,8 V besleme geriliminden 6V2 zener diyotla sağlanan voltaj IC1 entegresinin besleme ucu olan 8 numaralı bacağa bağlanmış. Bu aynı zamanda IC2 için de beslemeyi sağlıyor. |
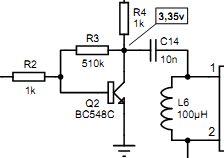 |
Kristal
filtrelerden sonra gelen yandaki bölümde
ise Q2 BC548 transistoruyla basit bir IF yükselteci yapılmış ve kristal
filtredeki kayıpların telafi edilmesi amaçlanmıştır.
|
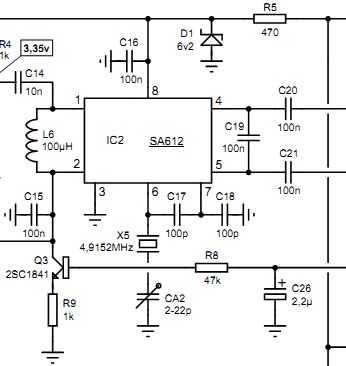 |
IF
yükselteçten geçen sinyalimiz IC2 yani detektör
devresine gelir. Burada önceki IC1 den hatırlayacağımız gibi IF ara
frekansı
giriş sinyali olarak 1 ve 2 numaralı uçlardan girer ve 4,9125 Mhz’lik
X5 kristaliyle
lokal osilatör sinyali (BFO) 6 numaralı uçtan girilir. CA2 ayarlı
kondansatörü
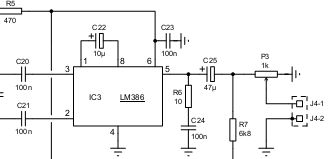
BFO frekansının hassas ayarını sağlar. Detektör devresinin çıkışında bulunan C19 kondansatörü istenmeyen kalıntı HF sinyalleri süzer ve C20, C21 kondansatörleri çıkışı IC3 girişinden yalıtır. |
 |
|

Voltaj otomatik kazanç kontrolü yukarıdaki gibi basit fakat etkili bir şekilde gerçekleştirilmiştir. SA612 girişinde (1 ve 2 numaralı pinler) voltaj tipik olarak 1,4 V civarındadır. Eğer bu voltaj düşerse SA612 entegresinin kazancı da düşecektir. Bu kazanç kontrol voltajını elde etmek için ses çıkıştaki ses sinyalinin bir bölümü R7 direnci ve D2 diyodu üzerinden alınır ve R8, C26 (R.C= yaklaşık 0,1 saniye) ikilisinin zaman sabitini ayarlayarak Q3 transistoruna uygulanır. Q3 transistoru R9 direnci ile beraber bir voltaj bölücü olarak davranarak IC1 ve IC2 girişlerindeki voltajı ayarlar. Bu uçlardaki voltaj 1,4 V (hiç sinyal yok) ve 0,6 V (maksimum sinyal) arasındadır. R10 direnci çok zayıf sinyallerin bastırılmasını önler. L6 bobini IC2 entegresinin girişindeki (1 ve 2 numaralı pinler arası) voltajı eşitler ve C15 yüksek frekanslı sinyalleri topraklar.
Çıkışta bulunan P3 potansiyometresi ses sinyalinin seviyesini ayarlar. Buradan çıkan sinyal Board 2’ye aktarılmaktadır.
Board 1’in buraya kadar olan bölümü alıcıyı oluşturmaktadır. Şimdi verici katımıza bir bakalım;
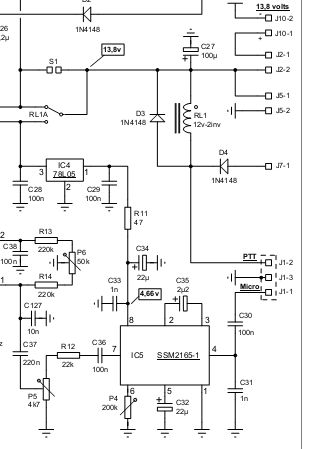 |
PTT yani gönderme tuşuna basılınca RL1 rölesi enerjilenir, RL1A ve RL1B kontakları kapanır ve ana şemadan göreceğiniz gibi alıcı kısmı devreden çıkar ve çıkışa verici devresi bağlanır. Mikrofondan gelen sinyal (J-1,2,3 uçları) IC5 entegresinin girişine (4 nolu pin) uygulanır. C31 kondansatörü yüksek empedanslı mikrofonların kullanılmasını daha kullanışlı hale getirmekte ve RF geri beslemeyi önlemektedir. IC5 entegresi yani SSM2165-1 düşük gürültülü ses işlemcisi de içeren bir ön yükselteçtir. Entegrenin sıkıştırma oranı 1/1 (hiç sıkıştırma yok) ve 15/1 arasında 6 numaralı pine bağlı dirençle ayarlanabilmektedir. 0 Ω 1/1 sıkıştırma oranına ve 250 kΩ 15/1 sıkıştırma oranına karşılık gelmektedir. Forty II devresinde 200 kΩ’luk (P4) bir potansiyometre kullanılmıştır ve 12/1 oranına kadar ayarlama yapılabilmektedir. Fakat 8/1 oranına kadar sıkıştırmanın seste bozulmayı önlemek için yeterli olduğu belirtilmiştir. IC5 entegresinin beslemesi (5 V) 8 numaralı pine bağlı 7805 regüle entegresi ile sağlanmaktadır. P5 potansiyometresi IC6 entegresine girişten önce sinyal seviyesinin ayarlanması için konulmuştur. C127 kondansatörü P5 potansiyometresinin konumuna göre IC6 dengeli modülatörünün bozulmasını engellemek amacıyla kullanılmıştır. Modüle edilecek SSB (tek yan bant) taşıyıcı sinyali IC6 entegresinin 6 numaralı ucuna bağlı 4,9152 MHz kristalle (X6) elde edilmektedir. CA3 kondansatörü ise sinyal frekansının ince ayarını yapmaktadır. 4 numaralı uçtan alınan RF sinyalinde istenmeyen yan bant yine 4lü bir kristal filtre ile bastırılmaktadır. |
 |
IC7 entegresinin osilatör girişi (6. uç) alıcı bölümdekiyle ortak olarak yine 2. boarddaki sentezleyiciden sağlanmaktadır. P2 potansiyometresi de sinyal seviyesini ayarlamakta. Kristal filtrelerden gelen SSB sinyal ve osilatörden gelen sinyal IC7 entegresinde karıştırılarak ve çıkış 4 ve 5 numaralı uçlardan alınır. Çıkıştaki L7 bobini ve C48 kondansatörü 40 m bandının uygun frekans aralığını geçirecek şekilde ayarlanmıştır. IC6 ve IC7 entegreleri için alıcıya benzer şekilde, 6,2 V besleme gerilimi D5 zener diyodu ile sağlanır. |
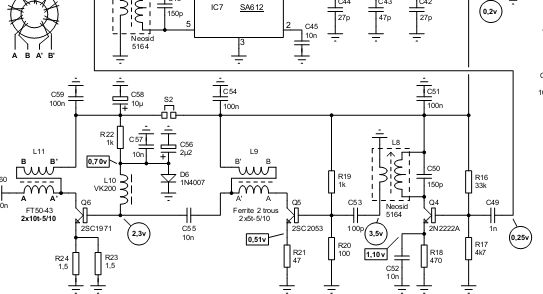 |
IC7 çıkışından süzülerek alınan sinyal üç aşamalı bir yükseltme devresine girer ve 5W seviyesine kadar yükseltilir. Burada Q6 transistoru girişte ve çıkışta yüksek empedansa sahiptir ve temel seçici yükseltmeyi yapar. Daha sonra bu sinyal Q5 ve Q6 transistorlarıyla daha da güçlendirilir. L9 ve L11 bobinleri ile empedans uyumu gerçekleştirilerek maksimum enerji transferi sağlanır. D6 diyotu ve R22 transistoru birlikte, L10 şok bobini üzerinden Q6 transistorunun AB sınıfı doğrusal çalışması için 0,7 V taban (base) voltajını sağlar. |
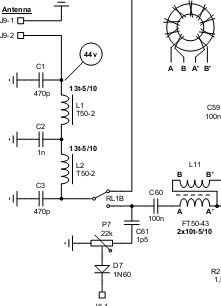 |
HF sinyalin bir bölümü C61 ve P7 üzerinden alınır ve D7 üzerinden güç göstergesi için kullanılır. En son aşamada tekrar RL1B röle kontağından geçen çıkış sinyalimiz alçak geçiren filtrede süzülerek antene uygulanır. Buraya kadar Forty2 için alıcı ve verici katlarını ele aldık. Buradan sonra frekans sentezleyicinin yer aldığı Board 2’yi inceleyeceğiz. |
Board 2a
Bu board üzerinde yer alan PLL (faz kilitlemeli döngü) frekans sentezleyicisi IC9 MC145170 seri olarak bir mikro kontrolcü (PIC 16F84) üzerinden kontrol edilmektedir. Tek döngülü (single loop) sentezleyici 100 Hz, 1 kHz ve 10 kHz’lik faz adımlarıyla ayarlanabilir. İncelemeye mikro denetleyici üzerinden başlarsak;
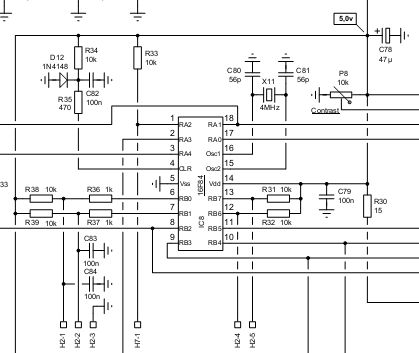 |
X11 4 MHz kristal ve C80, C81 kondansatörleri denetleyiciye saat sinyalini sağlar. R34, R3, C82, D12 elemanları reset devresini oluşturur. H2-1,2,3 uçlarına bağlı kodlayıcıdan (enkoder) gelen sinyaller, frekans seçimini yapar ve RB0 ve RB1 girişlerine uygulanır. Bu girişlere bağlı R36, R37 dirençleri ve C83, C84 kondansatörleri kodlayıcıdaki kararsızlıkları önlemek için kullanılmıştır (debounce). RB6 girişi, adım ayarını (100 Hz, 1 kHz, 10 kHz) ve zayıflatıcıyı (atteunator) devreye alma komutlarını alır. RB7 girişi, RIT (sabit gönderme(TX) frekansında, alış (RX) frekansının değiştirilmesi) seçimi ve filtre değerlerinin seçimi komutlarını alır. RA2 girişi PTT (gönderme) komutunu alır. RA1 veri (data), RB2 saat (clock) ve RA4 izin (enable) çıkışları seri olarak frekans sentezleyiciyi (IC9) kontrol eder. |
 |
Mikro denetleyicinin uç sayısı fazla olmadığı için bazı uçlar farklı fonksiyonlar için kullanılmış. LCD ekran kontrolü için veriler 4 bit olarak gönderilmekte ve RB2 (Q8 transistoru aracılığıyla),RB3,RB4,RB5 çıkışları veriyi ve RA0 izin (enable) komutunu, RA1 kaydedici seçimi (Register Select) komutlarını LCD’ye göndermekte. |
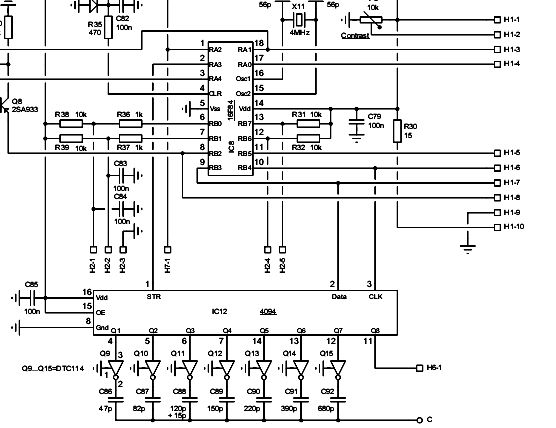 |
RA3, RB3 e RB4 uçları IC12 8 bitlik kaydırmalı kaydedici (shift register) 4094 entegresini kontrol ediyor. Bu entegre alçak geçiren filtre kondansatörlerini seçiyor ve zayıflatıcıyı (attenuator) kontrol ediyor. Burada sözü edilen alçak geçiren filtre Board 2b üzerinde yer alan MAX 293 entegresi. R30 direnci LCD ekran aydınlatması için akım sınırlıyor. P8 LCD ekran kontrastını ayarlıyor ve C78 kondansatörü LCD beslemesini filtreliyor. R31, R33, R38, R39 ve R41 mikro denetleyici çıkışlarını yüksek seviyede (+5 V) tutan pull-up dirençleri. |
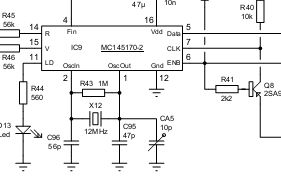 |
PLL frekans sentezleyici ICP için referans frekansı 12 MHz ve X12, R43, C95, C96 ve CA5 ile sağlanıyor. CA5 ile ince ayar mümkün. D13 LEDi sentezleyicinin istenilen frekansa kilitlendiğini gösteriyor. |
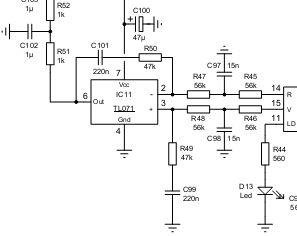 |
IC11 (TL071) entegresi sentezleyiciden gelen R ve V faz sinyallerini karşılaştırıyor ve gerilim kontrollü osilatör (VCO) için gerekli kontrol voltajını üretiyor. R45, R46, R47, R48, R49, R50 dirençleri ve C97, C98, C99 ve C101 kondansatörleri döngü filtresini oluşturuyor. |
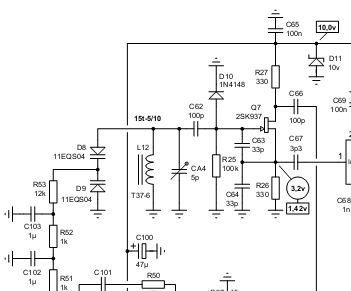 |
Alçak geçiren filtre (R51, R52, C102 ve C103 den oluşuyor) olası kalıntı gürültü sinyallerini süzüyor. Düşük gürültülü alan etkili transistor (FET) olan Q7 (2SK937) etrafında voltaj kontrollü osilatör (VCO) oluşturulmuş. L12, CA4 ve varikap diyotlar D8 ve D9 osilasyon frekansını belirliyor. D10 osilasyonun belirli bir seviyede stabil kalmasını sağlıyor. 10 V’luk zener diyot D11 osilatör ve faz karşılaştırıcı (IC11) için besleme gerilimini belirliyor. Transistorun (Q7) akaç (drain) ucundan alınan sinyalin bir bölümü IC7 sentezleyici entegreye uygulanıyor (C66 üzerinden). |
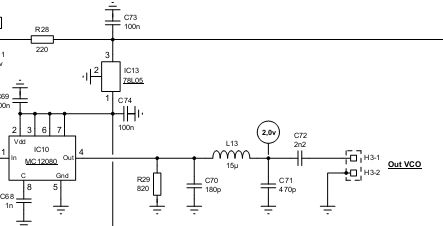 |
Q7 transistorunun kaynak (source) ucundan alınan sinyal ise frekans bölücü (IC10 MC12080) tarafından 10 a bölünür. Bu entegrenin çıkışında (4 numaralı uç) alıcı ve verici kısımda kullanacağımız osilatör sinyali elde edilir ve L13, C70, C71, C72 ile oluşturulan alçak geçiren filtre istenmeyen harmonikleri bastırır. |
Board 2b
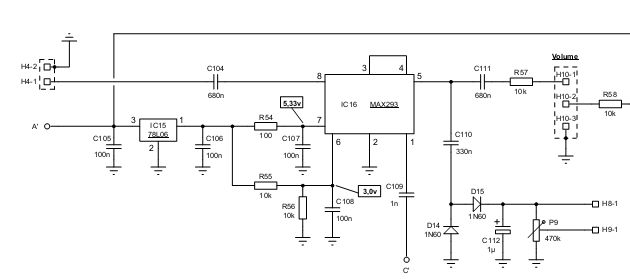
Ses sinyalinin işlendiği bu bölümde iki ana kısım var. IC6 (MAX 293) entegresi seçilebilen kondansatörle 8. dereceden eliptik bir alçak geçiren filtre olarak kullanılmış. Bant genişliği ve dolayısıyla seçicilik 1 numaralı uca bağlı kondansatörün değeriyle belirleniyor ve bu kondansatör board 2a üzerindeki IC12 (4094) entegresinin Q1 ve Q7 arasındaki uçlarında mikro denetleyici kontrollü olarak seçiliyor. IC15 (7806) entegresi gerekli besleme olan 6 V’u sağlıyor. 5 numaralı çıkış ucundan elde edilen filtrelenmiş ses sinyalimiz önce D14 ve D15 Germanyum diyotlarıyla doğrultulup P9 potansiyometresi ile seviyesi ayarlanarak sinyal metre devremize H9-1 (Board3) uygulanıyor.
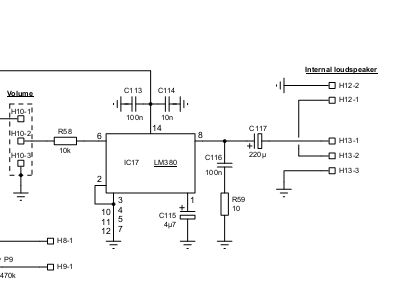 |
5 numaralı çıkıştan aldığımız ses sinyali ayrıca ses kontrolünden (volume) geçtikten sonra düşük frekanslı yükselteç (LF amplifier) olan IC7 (LM380) girişine (6 numaralı uç) uygulanıyor. 12 V besleme voltajı uygulandığında LM380 2W çıkış verebiliyor ve cihazın hoparlörünü (H12-1,2 ) sürmede kullanılıyor. |
Board 3
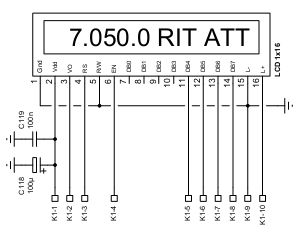 |
Bu board da bulunan eleman sayısı oldukça az. İlk olarak yanda gördüğümüz LCD ekran için veri, kontrol sinyalleri ve besleme board 2 üzerinden alınıyor. Besleme gerilimin süzülmesi için ik kondansatör (C118, C119) var. |
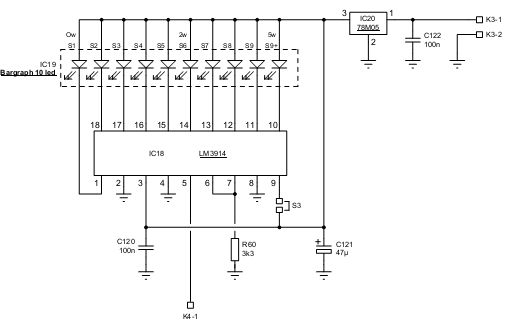 |
IC18 (LM3914) entegresi sinyal göstergesi olan bar LED grubunu sürmek için kullanılıyor. 5 nolu uca gelen voltaj sinyal şiddetine karşı kaç tane LED’in yanacağını belirliyor. Entegre regüle entegresi olan IC20 (7805) üzeinden 5V ile besleniyor. |
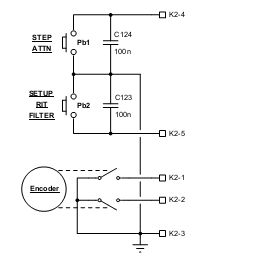 |
Bu board üzerinde yer alan son elemanlar ise frekans ayarını yapan kodlayıcı (encoder) ve Step, Attn ile Setup, RIT, Filter seçimlerini yapan bas bırak tipi (push button) butonlar. |
TA4ASO
– Şadan ÖZDEN