Πως να κατασκευάσετε ένα σύστημα Ανύψωσης
για τις δορυφορικές σας κεραίες

Actuators.
Τα Linear Αctuators είναι φτηνά εξαρτήματα που χρησιμοποιούνται στις τηλεοπτικές δορυφορικές κεραίες και έχουν αρκετά μεγάλη ροπή, ώστε να μπορούν να χρησιμοποιηθούν με πολύ καλά αποτελέσματα στα συστήματα Ανύψωσης κεραιών, που χρησιμοποιούν οι ραδιοερασιτέχνες για τους δορυφόρους τους.
'Ομως, στην πράξη απαιτείται αρκετή προσπάθεια για να προσαρμοστεί ένα Actuator σε ιδιοκατασκευασμένο σύστημα ανύψωσης κεραιών, έτσι ώστε να λειτουργήσει σωστά.
Σκοπός της σελίδας αυτής είναι, να σας διαφωτίσει γύρω από τα "μυστικά"
των Αctuators.
 |
 |
|
FIG.3 |
ΠΩΣ ΛΕΙΤΟΥΡΓΕΙ ?
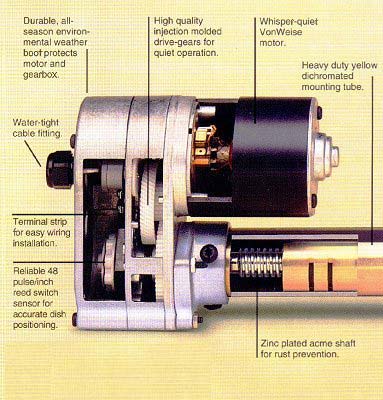
'Οπως είπαμε προηγουμένως, το actuator περιλαμβάνει ένα DC μοτέρ, ένα γραναζωτό μειωτήρα στροφών
και μέσα στο σωληνωτό του τμήμα φιλοξενείται ένας ατέρμονας κοχλίας. Το μοτέρ όταν περιστρέφεται, δίδει κίνηση δια μέσου του μειωτήρα στον ατέρμονα, μετατρέποντας έτσι την περιστροφική κίνηση του μοτέρ σε γραμμική μετατόπιση. Όταν το μοτέρ τροφοδοτείται με τάση κανονικής πολικότητας, το μήκος του Actuator αυξάνεται (εκτείνεται) όπως αυτό φαίνεται καθαρά στην κάτω εικόνα (FIG.4). Αντίθετα, όταν το μοτέρ
τροφοδοτείται με αντίστροφη πολικότητα, το εκταθέν (κίτρινο) τμήμα εισέρχεται μέσα στο σωληνωτό τμήμα (Arm) και το μήκος του Actuator μειώνεται.
 |
Απ' την άλλη πλευρά, μη νομίζετε ότι τα Actuators των 36 V δεν δουλεύουν και με... 12 Volts! Τα μοτέρ τους είναι αρκετά "ευαίσθητα"... σ'αυτό που χρησιμοποιώ προσωπικά, αν και είναι 36 V δουλεύει άψογα και με 12 Volts (0.3 A). Η μοναδική διαφορά είναι ότι με τα 12 V "κινείται" πολύ πιό αργά. 'Ομως αυτό κάθε άλλο παρά μειονέκτημα είναι ! Με την αργή κίνηση, μπορούμε να κάνουμε εύκολα μικρο-διορθώσεις στο Elavation, κάτι που είναι ιδιαίτερα χρήσιμο στους δορυφόρους ΗΕΟ (υψηλής τροχιάς), όταν αυτοί είναι κοντά στο απόγειο. Πάντως, σε κάθε περίπτωση, αν και όπως προείπα χρησιμοποιώ 36 V Actuator, ποτέ δεν το τροφοδοτώ με την μέγιστη τάση, αλλά με 12 - 24 Volts.
ΤΡΟΦΟΔΟΣΙΑ
Στην παραπάνω παράγραφο, περιγράψαμε την τάση που απαιτούν τα Actuators για να λειτουργήσουν ( 12-36 V).
Αν το actuator είναι 12 V, μπορούμε να χρησιμοποιήσουμε σαν πηγή τροφοδότησής του, το κυρίως τροφοδοτικό που έχουμε στο Shack (13.8V).
'Ομως, επειδή ουσιαστικά θα τροφοδοτήσουμε έναν κινητήρα συνεχούς ρεύματος, είναι γνωστό ότι
τα μοτέρ, την στιγμή της εκκίνησής τους δημιουργούν στιγμιαία μία υψηλότατη τιμή ρεύματος (Current peaking), η οποία συνήθως υπερβαίνει κατά 5 - 10 φορές (ή περισσότερο) το κανονικό ρεύμα λειτουργίας.
Οι ισχυρότατες αυτές μέγιστες τιμές ρεύματος, που λαμβάνουν χώρα μόνο κατά την εκκίνηση, δημιουργούν
κάποια προβλήματα.
Το πλέον σύνηθες είναι ότι, το τροφοδοτικό "βλέποντας" μία τόσο απότομη
ανύψωση στην κατανάλωση ρεύματος, "νομίζει" ότι υπάρχει βρχυκύκλωμα και ενεργοποιεί το κύκλωμα "προστασίας βραχυκυκλώματος", με αποτέλεσμα η τάση στην έξοδό του να μηδενίζεται.
Μία άλλη παρενέργεια, η οποία εμφανίζεται μετά από κάποιο διάστημα, είναι η βέβαιη καταστροφή του διακόπτη "Up-Down" που τροφοδοτεί το Actuator .
Για να αποφύγουμε λοιπόν το "καταστροφικό" ρεύμα εκκίνησης, μπορούμε να καταφύγουμε στο εξής τέχνασμα:
Συνδέουμε μία λάμπα αυτοκινήτου γύρω στα 5 W σε "σειρά" με το θετικό πόλο τροφοδότησης του Actuator.
Με τον τρόπο αυτό, δημιουργούμε μία "πηγή σταθερού ρεύματος", η οποία συμπεριφέρεται σαν "έλασμα" στις απότομες αυξήσεις κατανάλωσης ρεύματος, αποφεύγοντας όλα τα μειονεκτήματα που
προκύπτουν από την υψηλή τιμή ρεύματος εκκίνησης του μοτέρ.
Βέβαια, η ισχύς των 5 Watts για τον λαμπτήρα είναι ενδεικτική... η ισχύς εξαρτάται άμεσα από την κατανάλωση που έχει το μοτέρ στο Actuator και είναι γνωστό ότι, μερικά μοντέλα (ειδικά τα μεγάλα) είναι "ρευματοβόρα" !
Συνεπώς, αν το Actuator που έχετε καταναλώνει 1-2 Α, τότε σίγουρα μία λάμπα αυτοκινήτου των 5 Watts δεν πρόκειται να κάνει τίποτα... στην περίπτωση αυτή θα πρέπει να βάλετε λάμπα μεγαλύτερης ισχύος (πχ. 20 W) ή μερικές παράλληλα, ανάλογα με τις απαιτήσεις του φορτίου σας.
Αν δεν μπορείτε να υπολογίσετε την ισχύ της λάμπας, μπορείτε ν'ακολουθήσετε την εξής εμπειρική μέθοδο:
συνδέστε μία λάμπα, ξεκινώντας από τα 5 W... αν αυτή ανάψει δυνατά την στιγμή της εκκίνησης του Actuator
και έπειτα σβύσει σιγά-σιγά ενώ το Actuator τροφοδοτείται συνεχώς, είναι OK.
Εάν όμως η λάμπα παραμένει συνεχώς αναμμένη, αυτό σημαίνει ότι είναι μικρής ισχύος για την περίπτωση και χρειάζεστε κάποια άλλη με μεγαλύτερη ισχύ ή παραλληλισμό όμοιων λυχνιών, μέχρις ότου φθάσουμε στο ποθητό αποτέλεσμα.
Σημειώστε όμως, ότι το η ισχύς 5 W είναι απλώς ένα παράδειγμα. Οι τιμές της λάμπας εξαρτώνται άμεσα από την κατανάλωση ρεύματος που έχει το Actuator και σε κάθε περίπτωση τα "5 W" δεν είναι ο γενικός κανόνας.
Ακόμη, η τάση λειτουργίας της λάμπας έχει άμεση εξάρτηση από την πηγή που τροφοδοτείται το actuator. Συνεπώς, για 12 V θα χρησιμοποιήσουμε 6-12 V λάμπα, για 24 V 12-24 βολτ λάμπα κοκ.
 |
Η FIG.5 απεικονίζει ένα απλό κύκλωμα, με το οποίο μπορούμε να χειριζόμαστε ένα 12V TVRO Actuator για να μετακινείται ένα κύκλωμα Ανύψωσης πρός τα επάνω ("Up") ή προς τα κάτω ( "Down").
Ο S1 είναι ένας
διπλός ON-OFF-ON διακόπτης-μπουτόν (button-switch). Στην μεσαία θέση (ηρεμίας), δεν συνδέει καμμία επαφή . Εάν πιεσθεί προς το "Up", σ'αυτήν την περίπτωση τροφοδοτεί το καλώδιο ρευματοδότησης του Αctuator με κανονική πολικότητα και συνεπώς, το actuator εκτείνεται και ωθεί τον μηχανισμό ανύψωσης προς τα επάνω, δηλ. αυξάνεται το Elevation (ανύψωση κεραιών).
Αντίθετα, όταν ο S1 πιεσθεί στη θέση "Down", το μοτέρ του actuator τροφοδοτείται με αντίστροφη πολικότητα και το μήκος του actuator μικραίνει, έλκοντας τον μηχανισμό ανύψωσης πρός τα κάτω, δηλ. ουσιαστικά μειώνεται το Elevation.
A |
H FIG.6 εικονίζει ένα άλλο κύκλωμα για έλεγχο "Up-Down", με ηλεκτρονόμους. Με την χρήση του κυκλώματος αυτού, είναι δυνατός ο Ημιαυτόματος (χειροκίνητος) ή Αυτόματος έλεγχος ενός Actuator.
Ο χειροκίνητος έλεγχος γίνεται μέσω των 2 μπουτόνς B1, B2. Π.χ. πιέζοντας το Β1 αυξάνουμε την ανύψωση και αντίστοιχα πιέζοντας το Β2 την μειώνουμε.
Με το τρόπο αυτόν, καθοδηγούμε εμείς το σύστημα ανύψωσης και επεμβαίνουμε στα Β1,Β2 για την στόχευση του δορυφόρου.
Το σύστημα αυτό, αν και στους δορυφόρους Υψηλής Τροχιάς μπορεί να εφαρμοσθεί μ'επιτυχία, δυστυχώς στους αντίστοιχους "Χαμηλής τροχιάς" δεν ενδείκνυται, διότι λόγω των χαμηλών τροχιών τους κινούνται γρήγορα στις διελεύσεις υπεράνω μας και πρέπει μάλλον να τους "κυνηγάμε", παρά να έχουμε διαθέσιμο χρόνο για συνομιλία.
O Αυτόματος έλεγχος του Actuator είναι δυνατόν να γίνει, όχι μέσω των μπουτόνς Β1,Β2 αλλά με την ενεργοποίηση των 2 ηλεκτρονόμων μέσω κάποιου προγράμματος Satellite Tracking.
Το Interface του προγράμματος μπορεί να ενεργοποιήσει τους 2 αυτούς ηλεκτρονόμους, μέσω οδηγών-τρανζίστορς σε συνδεσμολογία "γειωμένου εκπομπού".
Εάν το σημείο A ή το B "γειωθεί" μέσω των τρανζίστορς αυτών, αντίστοιχα ο ηλεκτρονόμος Α ή Β ενεργοποιείται.
Για παράδειγμα, αν "γειωθεί" το σημείο "A", το RL1 ενεργοποιείται και το actuator
τροφοδοτείται με ορθής πολικότητος τάση και το Elevation αυξάνεται.
Το αντίθετο συμβαίνει αν
"γειωθεί" το σημείο B.
Οι δίοδοι "D" είναι κοινά διόδια πυριτίου 1N4003, 1N4004 κλπ.
Υπ'όψιν ότι, το κύκλωμα αυτό έχει προστασία διαμέσου των επαφών του κάθε ηλεκτρονόμου, ώστε αν κατά την "ημιαυτόματη" λειτουργία πιεσθούν ταυτόχρονα τα μπουτόνς Β1-Β2, να μην ενεργοποιούνται και οι 2 ηλεκτρονόμοι συγχρόνως. Αυτό είναι απαραίτητο, διότι αν δεν υπήρχε αυτή η προστασία και ενεργοποιούντο και οι 2 ηλεκτρονόμοι, θα "βραχυκύκλωνε" ο θετικός με τον αρνητικό πόλο του τροφοδοτικού.
Η δυνατότητα που μας παρέχει το κύκλωμα αυτό, είναι ιδιαίτερα χρήσιμη για τον τηλε-χειρισμό του συστήματος ανύψωσης (Elevation) από κάποιο Satellite tracking πρόγραμμα. Π.χ. με το FODTRACK PCB και το κύκλωμα αυτό, είναι δυνατόν να οδηγήσουμε οποιοδήποτε Αctuator. (Fodtrack connector: pin3 στο "A" & pin 5 στο "B")
Η τάση των + 5V που φαίνεται στο σχέδιο, είναι τυπική. Σ'αυτήν την περίπτωση τα RL1 - RL2 πρέπει να είναι για 6V DC. Οπωσδήποτε, οποιοδήποτε διαφορετικής τάσης Relay μπορεί να χρησιμοποιηθεί
χωρίς πρόβλημα αλλά, η τελική επιλογή θα πρέπει να γίνει με γνώμονα την τάση λειτουργία του ηλεκτρονικού συστήματος ελέγχου που διαθέτουμε.
Στην παραπάνω παράγραφο, είδαμε πως μπορούμε ν'αντιμετωπίσουμε το πρόβλημα στην εκκίνηση του Actuator, με την χρήση μίας απλής λάμπας. Το τεχνασμα αυτό είναι απλό και αποδίδει. Αλλά αν το Actuator δεν είναι 12 V ή απαιτούμε ένα πιό σύνθετο και αξιόπιστο σύστημα με ανεξάρτητο τροφοδοτικό, τότε θα πρέπει να χρησιμοποιήσουμε κάτι διαφορετικό.
Στην FIG.7 φαίνεται ένα απλό σχέδιο τροφοδοτικού, το οποίο μπορεί να τροφοδοτήσει ένα Αctuator. Το κύκλωμα χρησιμοποιεί το γνωστό LM317T IC-Regulator.
Το ολοκληρωμένο αυτό ( LM317Τ ), έχει το πλεονέκτημα να διαθέτει εσωτερικό "περιοριστή ρεύματος" !
Συνεπώς, το μέγιστο επιτρεπόμενο ρεύμα που μπορεί να αποδώσει είναι 1.5 Amperes και δεν χρειάζεται πλέον η χρήση της λάμπας LP για την ομαλή εκκίνηση.
Επιπρόσθετα, το LM317Τ μας παρέχει την δυνατότητα "μεταβλητής τάσης εξόδου", η οποία ρυθμίζεται μέσω του P1. Συμπερασματικά, το κύκλωμα αυτό μπορεί να τροφοδοτήσει σχεδόν όλα τα μοντέλα Actuators μεταξύ 12-36 Volts, που έχουν μέγιστη κατανάλωση ρεύματος 1 - 1.2 Amp.
Γενικά, το LM317T είναι ένα ολοκληρωμένο κύκλωμα σε θήκη 3 ακροδεκτών (ΤΟ-220) που μας παρέχει ρυθμιζόμενη έξοδο τάσεως μεταξύ 1.2 - 37 Volts / 1.5 Α. Περιέχει επίσης εσωτερικό κύκλωμα προστασίας για υπερθέρμανση και περιορισμό του ρεύματος εξόδου, με μέγιστη τιμή τα 1,5 Amperes. H τάση "εισόδου" πρέπει να είναι 3-4 Volts μεγαλύτερη (ή περισσότερο) από την τάση "εξόδου",
αλλά σε καμμία περίπτωση δεν πρέπει να υπερβαίνει τα 40 Volts (= maximum input).
Η τάση εξόδου ορίζεται από τον διαιρέτη R1, R2 (όπου R2 = R+P1 στην FIG.7).
Ο υπολογισμός της τάσης εξόδου μπορεί να γίνει με τον παρακάτω κανόνα:
Υπ'όψιν ότι, στο κύκλωμα έχω χρησιμοποιήσει στη θέση της R2 ένα συνδυασμό αντιστάσεων μ'ένα ποτενσιόμετρο ( P1) και μία σταθερή αντίσταση ( R ). Με τον τρόπο αυτό η έξοδος τάσεως είναι ημι-μεταβλητή,
δηλ. η έξοδος μεταβάλλεται μεταξύ 8 - 14 ή 12 - 24 Volts (βλέπε FIG.7 για τις τιμές P1 & R ).
Η μόνη αναγκαιότητα όπως περιγράψαμε παραπάνω είναι: η τάση "εισόδου" (στο Pin 1 ή στα άκρα του C1)
να είναι 3-4 Volts υψηλότερη από την τάση "εξόδου" αλλά, προσέχοντας πάντα να μην υπερβούμε τα 40 V στην είσοδο.
'Εχοντας υπ'όψιν τα παραπάνω, αν θέλουμε να έχουμε έξοδο 24 V, είναι απαραίτητο η τάση εισόδου
να είναι 27-28 V (Pin 1 του LM317). Για 12 Volts έξοδο, 15-16 V είσοδο. Για τους λόγους αυτούς λοιπόν, θα πρέπει το δευτερεύον του μετασχηματιστού TR1 να επιλεχθεί με γνώμονα την προυπόθεση αυτή και η ισχύς του μετ/στού να είναι ικανή να διατηρήσει την τάση εισόδου 3-4 Volts περισσότερο από την έξοδο, σε συνθήκες μέγιστου φορτίου.
Με την χρήση του LM317T υπάρχει ένα ακόμη πλεονέκτημα:
η μεταβλητή τάση εξόδου που μπορεί να ρυθμιστεί άπό το P1, μας δίδει την δυνατότητα να λειτουργεί το Actuator με μεταβλητή ταχύτητα αντίστοιχα. Με τον τρόπο αυτόν, δηλ. μειώνοντας την τάση τροφοδοσίας, είναι δυνατόν το Actuator να μετακινείται με μικρή ταχύτητα (slow-motion), κάτι που μας επιτρέπει στην πράξη να επιτυγχάνουμε πολύ εύκολα μικρο-διορθώσεις της γωνίας ανύψωσης (Elevation).
 |
|
 |
R=1K2 P1=1K
|
Πριν κλείσει αυτή η παράγραφος, θα πρέπει να ληφθούν υπ'όψιν ορισμένα κατασκευαστικά σημεία που αφορούν το LM317T: το Pin 2 του ολοκληρωμένου, συνδέεται εσωτερικά με το μεταλλικό τμήμα της θήκης (TO-220).
Για τον λόγο αυτόν, θα πρέπει να είστε ιδιαίτερα προσεκτικοί αν χρησιμοποιήσετε κάποια ψύκτρα για απαγωγή θερμότητας, φροντίζοντας να τοποθετηθεί η σχετική μίκα μεταξύ LM317 και ψύκτρας... διότι αν η ψύκτρα είναι ηλεκτρικά συνδεδεμένη με τον αρνητικό πόλο (σασσί) και το LM317 βιδωθεί απ'ευθείας στην ψύκτρα, τότε θα υπάρξει "βραχυκύκλωμα" μεταξύ της εξόδου (μεσαίο Pin του LM317) και του αρνητικού πόλου με αποτέλεσμα η έξοδος του κυκλώματος να είναι μηδενική.
Το κύκλωμα αυτό, αν τροφοδοτήσει κάποιο Actuator με κατανάλωση μέχρι 0.3 Amps, δεν είναι απαραίτητη η τοποθέτηση κάποιας ψύκτρας, καθ'ότι ο "κύκλος λειτουργίας" (duty cycle) είναι πολύ μικρός. Αν όμως η κατανάλωση του Actuator υπερβαίνει την τιμή αυτή, μία μικρή ψύκτρα οπωσδήποτε θα βοηθήσει στην ομαλότερη λειτουργία του LM317.
Στην περίπτωση που το Αctuator σας έχει κατανάλωση μεγαλύτερη από 1 Α, π.χ. μεταξύ 1-2,5 Amps, μπορεί να χρησιμοποιηθεί το LM350T στη θέση του LM317T.
Tο LM350T έχει την ίδια ακριβώς θήκη (TO-220) και παρόμοια χαρακτηριστικά με το LM317, αλλά το μέγιστο ρεύμα που παρέχει στην έξοδό του είναι μέχρι 3 Amps (και σε κάθε περίπτωση αυτό χρειάζεται ψύκτρα ! ).
"ΤΕΡΜΑΤΙΣΜΟΣ" διαδρομής
Τα Αctuators, είναι εφοδιασμένα με "τερματικούς διακόπτες", οι οποίοι υπάρχουν στο καπάκι του μειωτήρα (κάτω μέρος). Η ύπαρξη και χρήση τους είναι απολύτως απαραίτητη, διότι με την σωστή τους ρύθμιση επτυγχάνουμε την μετακίνηση του συστήματος ανύψωσης μεταξύ του ανώτατου(90°) και του κατώτατου σημείου (0°) διαδρομής με ασφάλεια, προστατεύοντας με τον τρόπο αυτό το σύστημα ανύψωσης από οποιαδήποτε ζημιά (σπάσιμο ή στρέβλωση των μπράτσων στήριξης κλπ.)
Ο τρόπος που επεμβαίνουν οι διακόπτες αυτοί είναι ο εξής: στον κύριο άξονα του μειωτήρα, υπάρχουν 2 ρυθμιζόμενα γρανάζια με έκκεντρα, που περιστρέφονται με τον ατέρμονα. Όταν το Actuator ωθήσει το σύστημα ανύψωσης στο ανώτατο σημείο, το "ρυθμιζόμενο" έκκεντρο του δακτυλίου πιέζει τον τερματικό διακόπτη και διακόπτει την τροφοδοσία του μοτέρ (βλέπε FIG.8). Για να λειτουργήσει και πάλι, πρέπει ν'αντιστρέψουμε την πολικότητα, ώστε να υπάρξει αντίστροφη περιστροφή στο μοτέρ, δηλ. συρρίκνωση του Actuator (ή το αντίστροφο).
Με την βοήθεια λοιπόν των τερματικών διακοπτών, εφ'όσον τους ρυθμίσουμε σωστά, το σύστημα ανύψωσης μετακινείται μέσα στα όρια που εμείς έχουμε ορίσει (π.χ. 0-90° ) και αποτέλεσμα αυτού είναι η εξασφάλιση της ασφαλούς διαδρομής (τεταρτημόριο κύκλου), αποτρέποντας το Actuator να ωθήσει τα μηχανικά μέρη πέραν των
ορίων που επιτρέπει η μηχανική κατασκευή, κάτι που θα είχε ως αποτέλεσμα την πρόκληση ζημιάς.
 | |
Θα πρέπει να ληφθεί υπ'όψιν ότι, η γωνία ανύψωσης 0-90° που επιτυγχάνουμε με ένα Αctuator, στην πράξη μειονεκτεί αν συγκριθεί με ένα σύστημα διπλού ρότορα για Elevation, το οποίο μπορεί να μετακινεί τις κεραίες σε τόξο 0-180° (η λειτουργία αυτή ονομάζεται "Flip-Mode").
Έτσι, αν ο δορυφόρος περνά ακριβώς πάνω από το QTH μας (overhead pass), το σύστημα ανύψωσης με το Αctuator δεν μπορεί ν'ακολουθήσει τον δορυφόρο συνεχώς, μέσα στο νοητό τόξο 0-90°-180°, μεταξύ AOS - TCA - LOS !
Πρώτα θα πρέπει να αυξηθεί το Elevation μέχρι τις 90° και αμέσως μετά θα πρέπει να περιστραφεί ο ρότορας Αζιμουθίου 180° (στην αντίθετη ακριβώς διεύθυνση). Μετά την κίνηση αυτή, το actuator θα λειτουργήσει αντίστροφα, μειώνοντας πλέον σταδιακά το elevation από τις 90 μέχρι τις 0°... με το "τέχνασμα" αυτό μπορούμε ν'ακολουθούμε δορυφόρους σε "Οverhead" διελεύσεις. Οπωσδήποτε, το μειονέκτημα αυτό δεν υφίσταται στους διπλούς ρότορες, αλλά το 99% από τις
τροχιές στους LEO satellites δεν περνά ακριβώς από πάνω μας, συνεπώς, δεν τίθεται καν θέμα !
Το πρόβλημα υφίσταται μόνο στις 90°... αν για παράδειγμα, ο δορυφόρος περνά με ανύψωση έως 89°, δεν υπάρχει κανένα απολύτως πρόβλημα.
Πρακτικά, το "τόξο" που καλύπτει ένα σύστημα ανύψωσης με actuator και γωνιακό σύνδεσμο* (*βλέπε εικόνα παρακάτω) είναι περισσότερο από 90°. Μπορούμε να φθάσουμε τις 135°, αλλά σε κάθε περίπτωση, αυτό δεν είναι αρκετό για "overhead" διελεύσεις.
Μία πιό επιτηδευμένη λύση απεικονίζει η παρακάτω εικόνα (πατέντα του PA4FP !)

Ο συγκεκριμένος συνάδελφος PA4FP, επινόησε μία εξυπνη μέθοδο, κάνοντας χρήση ενός μικρού γραναζωτού μειωτήρα (πιθανόν από κάποιο παιχνίδι). Το αποτέλεσμα είναι ότι, η περιστροφή του μοτέρ ή του ατέρμονα να
μειώνεται τόσο, έτσι ώστε να οδηγεί πλέον απευθείας ένα δεκάστροφο ποτενσιόμετρο, χωρίς να χρειάζονται επιμέρους βραχίονες, πετονιές και.... αγκίστρια !
Η ιδέα φαντάζει υπέροχη, μαγική..... ο ενθουσιασμός όμως θα σας περάσει αμέσως, μόλις καταλάβετε (όπως κι'εγώ !) ότι η ανεύρεση, προσαρμογή κλπ. ενός παρόμοιου μικρού γραναζωτού μειωτήρα, δεν είναι καθόλου εύκολη υπόθεση... !
Ας υποθέσουμε όμως ότι τα έχετε καταφέρει να προσαρμόσετε μ'επιτυχία ένα ποτενσιόμετρο στο Elevation. Το κύκλωμα που εικονίζεται στη FIG.9, είναι η "άλλη άκρη του νήματος" για να βλέπετε τι ακριβώς ανύψωση έχουν οι κεραίες σας, μέσα στο Shack. Το P1 είναι το ποτενσιόμετρο κοντά στο μηχανισμό ανύψωσης. Όταν μετακινείται ο δρομέας του συγχρονισμένα με το Elevation, μεταβάλλεται η αντίστασή του και κατά συνέπεια μεταβάλλεται και η τάση στο όργανο M1. Αν το τελευταίο είναι βαθμονομημένο σε "μοίρες" (0-90°), έχουμε ένδειξη της μεταβολής ανύψωσης και μάλιστα με μεγάλη ακρίβεια (1°). Η "κόκκινη" γραμμή στη FIG.9 δείχνει το τμήμα που είναι εκτός Shack, δηλ. το καλώδιο και το ποτενσιόμετρο. Τα υπόλοιπα μπορούν να μπούν σε κάποιο κουτί, μαζί με τα χειριστήρια "Up-Down" για το Actuator.
Τα P1 & P2 είναι 5 ΚΩ και το P3 = 10 ΚΩ, γραμμικά ποτενσιόμετρα. Τα P2 & P3 μπορεί να είναι πολύστροφα τρίμερ, έτσι ώστε να ρυθμίζουμε εύκολα το "άνω" και "κάτω" όριο.
το M1 δεν είναι κρίσιμο... οποιοδήποτε όργανο κινητού πλαισίου 0.1 - 1 mA καλύπτει τις ανάγκες του κυκλώματος.
Η ρύθμιση του οργάνου Μ1 για σωστή ένδειξη, γίνεται ως εξής:
α)ρυμίζουμε τον δρομέα στα Ρ2 και Ρ3, περίπου στο 1/3 από την πλευρά της γείωσης (αρνητικό)
β)τοποθετούμε την κεραία μας στο μέγιστο σημείο ανύψωσης, π.χ. 90° και ρυθμίζουμε το Ρ2 για μέγιστη απόκλιση του οργάνου.
γ)κατεβάζουμε την ανύψωση της κεραίας στο ελάχιστο, π.χ. 0° και ρυθμίζουμε το Ρ3 για ελάχιστη ένδειξη του οργάνου Μ1.
Τα βήματα "β" και "γ" θα επαναληφθούν αρκετές φορές, έτσι ώστε
να έχουμε απόλυτα σωστή ένδειξη στο Μ1, δηλ η βελόνα του ν'αποκλίνει πλήρως όταν η κεραία είναι στο ανώτατο σημείο και αντίστοιχα να δείχνει "0" όταν η κεραία είναι κατεβασμένη στις 0°.
 |
Κλείνοντας τη σελίδα αυτή, θα προσπαθήσω να σας δώσω 1-2 ιδέες, για το πως μπορείτε να κατασκευάσετε κάτι παρόμοιο χωρίς "ειδικά" εργαλεία, αλλά κάνοντας χρήση ενός κατσαβιδιού, ενός τρυπανιού και μιάς πένσας.
Αναρρωτιόμουν πολλές φορές πως θα γινόταν κάτι τέτοιο. Η πρώτη απλή ιδέα εικονίζεται στις παρακάτω εικόνες.
Η FIG.10 δείχνει, πώς μπορούμε να κατασκευάσουμε ένα αρμό (άρθρωση), χρησιμοποιώντας απλώς 4 μεταλλικές γωνίες, 2 πλάκες αλουμινίου (ή μεταλλικές), μία ντίζα για άξονα, μερικά U-Bolts και μερικές βίδες με τα σχετικά παξιμάδια τους. 'Ολα αυτά μπορείτε να τα προμηθευτείτε εύκολα από κάποιο χρωματοπωλείο, με περίπου 10 Eυρώ.
Στην εν λόγω κατασκευή λοιπόν, που φαίνεται στην FIG.10, ο οριζόντιος σωλήνας (tube όπως γράφει η εικόνα), ο οποίος αποτελεί το Cross-Boom όπου στηρίζονται επάνω του οι κεραίες, μπορεί να μετακινείται στην περίμετρο του τεταρτημορίου ενός νοητού κύκλου που έχει σαν κέντρο του την ντίζα ( Elevator-Axis, όπως γράφεται στη Fig.9).
.
 |
Οι ακόλουθες εικόνες δείχνουν, πως επενεργεί το Actuator σε συνδυασμό με τη άρθρωση, έτσι ώστε να μεταβάλλει την γωνία ανύψωσης της κεραίας.
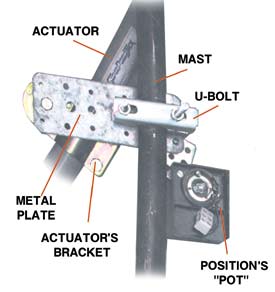
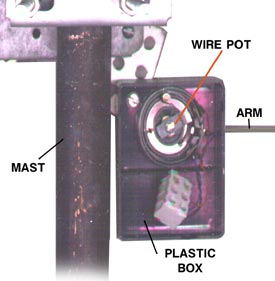
Οι ακόλουθες εικόνες εικονίζουν με λεπτομέρειες το 1ο Elevator που κατασκεύασα με Actuator :
 |  |
 |  |
![]()
Ο εξωτερικός σωλήνας είναι σταθερός και "δένει" στη μεταλλική πλάκα του ιστού με U-bolts... ο εσωτερικός σωλήνας, έχει μικρότερη διάμετρο
και "γλυστράει" μέσα στο εξωτερικό σωλήνα με την βοήθεια γράσου.
Η μέθοδος αυτή είναι κατασκευαστικά απλούστερη από την προηγούμενη, αλλά έχει αρκετά μεγάλες "τριβές" μεταξύ των δύο σωλήνων.
'Ομως, είναι πολύ ανθεκτική και μπορεί να καλύψει άνετα "βαριά" κεραιο-συστήματα, όπως "stacked Yagis", κεραίες για EME κλπ..

![]()
Τέλος, αν έχετε κάποια ιδέα, απορία, πρόταση κλπ. σχετικά με το θέμα της σελίδας αυτής, με πολλή χαρά θα την διαβάσω. Στείλτε απλώς ένα Email
Αυτά τα ....λίγα για την ώρα!
Να περνάτε καλά και μην ξεχνάτε:
ο ραδιοερασιτεχνισμός είναι διασκέδαση.
Μάκης SV1BSX (Οκτ. 2004)
© All rights reserved 2004-2006 |
![]()