Projeto de circuito para ajuste automático de sintonia de Magloop.
por PY4ZBZ em 07-07-2015 rev. 28-07-2015
Uma forma de ajustar automaticamente a sintonia de uma magloop é ajustar o capacitor variável de sintonia até obter um mínimo de ROE (SWR), mas isso requer um circuito um pouco complexo. Importante: a medição da ROE ou do coeficiente de reflexão de tensão é independente da potencia TX.
Uma outra forma mais simples é atuar no capacitor até que a ROE esteja abaixo de um certo valor aceitável, e é descrita a seguir.
Para medir a ROE é preciso usar um acoplador direcional, que pode ser realizado de diversas formas, como por exemplo o acoplador de BRUENE, ou o acoplador "Tandem match", ou o acoplador de linhas paralelas, etc...
Qualquer um desses acopladores direcionais, inserido no cabo coaxial que liga o transmissor à antena, fornece duas saídas com amostras das tensões (ou correntes) direta e refletida presentes no cabo.
A relação entre a tensão refletida Vr e a tensão direta ou incidente Vi é chamada de coeficiente de reflexão de tensão r, e que pode variar de 0 a 1:
A ROE ou SWR, relação de onda estacionaria, é calculada a partir do coeficiente de reflexão de tensão, da seguinte forma, e pode variar de 1 a infinito:
O ábaco seguinte mostra essa correspondência entre ROE e coeficiente de reflexão de tensão:
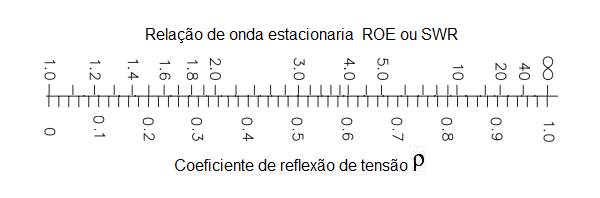
Por exemplo, quando a antena está perfeitamente casada com o cabo, o coeficiente de reflexão de tensão será 0 e a ROE será igual a 1.
Convém lembrar que o quadrado do coeficiente de reflexão de tensão corresponde ao coeficiente de reflexão de potencia, ou seja, a fração da potencia que está sendo refletida. Por exemplo, se a REO=2, então o coeficiente de reflexão de tensão é 0,333 e o de potencia é 0,333x0,333=0,11 , ou seja, 11% da potencia direta que chega na antena é refletida de volta en direção ao TX.
A grande maioria de medidores de ROE na verdade mede o coeficiente de reflexão de tensão, mas tem a escala do medidor graduada em ROE, de acordo com a correspondência mostrada acima.
O nosso projeto simples é baseado na medida indireta do coeficiente de reflexão de tensão, porque para calcular a ROE, é preciso primeiro calcular o coeficiente de reflexão de tensão, e para tal, é preciso fazer uma divisão, que só pode ser feita por um circuito eletrônico um pouco complexo, como amplificadores operacionais logarítmicos ou com microprocessadores.
E o que na verdade nos interessa, é saber se o coeficiente de reflexão de tensão está acima (ou abaixo) de um certo valor K, ou seja, se (Vr/Vi)>K, ou ainda, se Vr>KVi.
Portanto, agora precisamos apenas multiplicar Vi por K. Mas como K é um valor maior que 0 e menor que 1 (algo entre 0,1 e 0,2 por exemplo), essa multiplicação pode ser feita por um simples divisor resistivo (fixo ou ajustável). A decisão ">" (maior que) é feita por um simples comparador. Se for verdadeira, a saída do comparador vai a Vcc e aciona-se o motor. Caso contrario Vr<KVi, a saída do comparador vai a zero volts e o motor fica parado.
Realização pratica.
Obs.: Esse sistema é ideal para capacitores tipo borboleta, que além de serem mais eficientes por não possuírem (maus) contatos moveis, podem ter o seu rotor girado indefinidamente e num único sentido. Outros tipos de capacitores variáveis poderão ser usados desde que sejam acrescentados contatos/reles inversores de fim de curso no circuito do motor.
O nosso projeto se baseia na comparação das tensões Vi e Vr fornecidas por um acoplador direcional, e pode ser ajustado para parar o motor quando o coeficiente r fica menor que um um determinado valor K.
Por exemplo, se o motor deve parar quando a ROE ficar menor que 1,5 , isso significa que o coeficiente de reflexão de tensão deve ser menor que 0,2. Para isso, basta usar um comparador de tensão com amplificador operacional, que recebe Vr em uma das entradas e Vi atenuado por um divisor resistivo para 0,2 ou 20% na outra entrada, ou Kvi. Um potenciômetro ou trimpot permite escolher qualquer outro valor de K. O comparador é ligeiramente realimentado positivamente (R5) para apresentar histerese e assim evitar indecisão no limiar de chaveamento. Para funcionar com tensões Vr e Vi desde de quase zero e com uma fonte simples (+V e 0) usamos um amplificador operacional do tipo LM358. (o 741 não serve porque com fonte simples +V apresenta um offset de 2V). E para que o comparador fique em repouso quando as tensões Vr e Vi estão próximas de zero (em RX por exemplo, ou pausas de voz em TX SSB), adicionamos o circuito composto por RV , R7 e R8.
O diagrama seguinte mostra uma possível implementação:
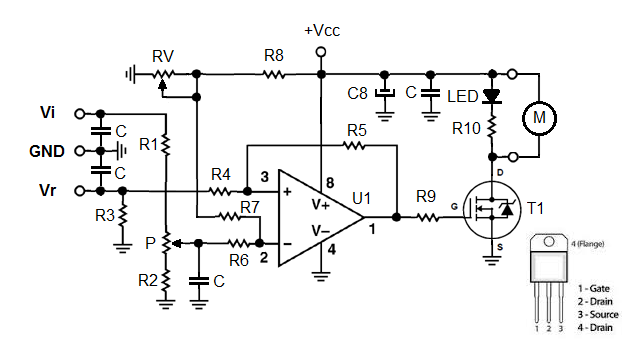
Valores dos componentes:
R1=33k R2=1k P=10k R3=R4=R6=47k R5=4M7 RV=1k (trimpot) R7=150k R8=4k7 R9=10k R10=1k
C (C1 a C4) =10n C8=10u eletrolítico U1=LM358 T1=IRF540 M=motor DC Vcc= 6 a 15V
Possível layout do circuito impresso:
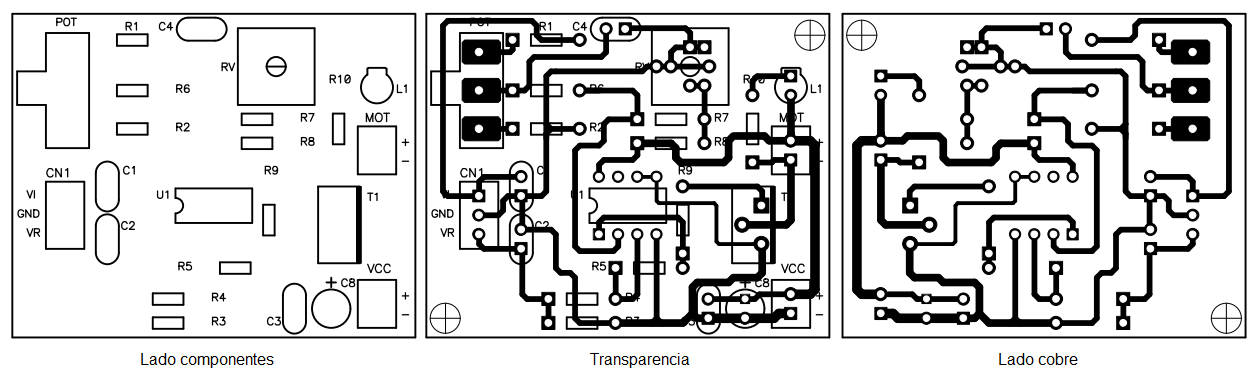
As entradas Vi , Vr e GND estão ligadas às respectivas saídas do acoplador direcional, Vi = tensão direta ou incidente (FWD) e Vr = tensão refletida (REF).
Essas tensões devem ser menores que Vcc quando a potencia transmitida é máxima.
O potenciômetro P permite escolher o valor da ROE para o qual o motor pára : entre 1,2 e 3 (com cursor para baixo e para cima respectivamente).
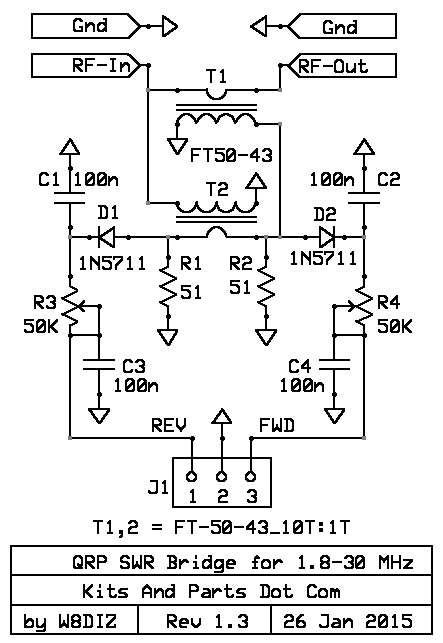
Com o acoplador da figura seguinte, a faixa de funcionamento testada em HF (3,5 a 28 MHz) é a seguinte:
2 a 20 W , com T1 e T2 com 10 espiras
5 a 100 W , com T1 e T2 com 12 espiras
O ajuste de RV é feito sem RF, com RV inicialmente em zero, e aplicando por 1 segundo Vcc via resistor de 10k na entrada Vr, acendendo assim o LED. Em seguida, abrir lentamente RV até o LED apagar, e abrindo mais uns 10%. Esse ajuste depende de Vcc, ou seja, é diferente para Vcc = 6 ou 12 V.
Se usar o acoplador da figura seguinte, ajustar os seus trimpots para zero ohms, ou substituí-los por resistores de 1 k.
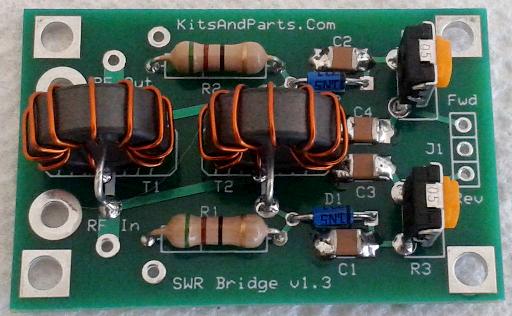
As figuras seguintes são um exemplo de acoplador direcional do tipo "Tandem match" da Kits and parts :
73 de Roland.