Yöngüdüm (navigasyon), bir aracı veya insanı bir yerden başka bir yere ulaştırma olarak tanımlanmaktadır. Her insan günlük hayatta aslında bir tür navigasyon yapmaktadır. Radyonavigasyon araçları ile elektronik sinyaller yayarak daha karmaşık türde navigasyon yapmak mümkündür. Bu sinyallerin işlenmesi ile kullanıcı konumunu belirli doğruluk sınırları içerisinde belirleyebilmektedir.
Radyonavigasyon olanakları yer tabanlı ve uzay tabanlı olarak sınıflandırılabilmektedir. Yer tabanlı sistemlerin doğruluğu büyük ölçüde çalışma frekansı ile orantılıdır. Yüksek doğruluklu sistemler genellikle kısa dalgaboylarında yayın yaptıkları için, kullanıcı görüşhattı (line of sight) içinde kalmak zorundadır. Düşük frekanslı sistemler görüşhattı ile sınırlı değilse de daha az doğruluk sınırlarına sahiptirler.
Uzay tabanlı sistemlerin öncüleri sayılan Transit (U.S.
Navy Navigation Satellite System) ve Rus Tsikada sistemleri yüksek doğrulukta
iki boyutlu konum bilgisi sağlayan sistemlerdir. Fakat bu konum belirleme sıklığı
enleme göre değişmektedir. Kuramsal olarak ekvator üzerindeki bir kullanıcı
için bu sıklık 110 dakikada bir iken 80° enlemde 30 dakikada bir
olabilmektedir. Bu olanaklar göreli düşük hızlarından dolayı gemiler için
uygun iken hava araçları ve daha dinamik kullanımlar için uygun olmamaktaydı.
Bu gereksinimlerden yola çıkılarak Amerika Birleşik Devletleri NavStar GPS (NavStar
Global Positioning System) ve Rusya da GLONASS (Global'naya Navigatsionnaya
Sputnikovaya Sistema) sistemlerini geliştirmişlerdir.
1960 başlarında aralarında A.B.D. Ordusu, NASA ve
A.B.D. Ulaştırma Bakanlığının da yer aldıkları A.B.D. hükümet kuruluşları,
konum belirleme amaçlı uydu sistemleri geliştirmeye ilgi duymaktaydılar.
Sistemin belirlenen temel ölçütleri:
1964 yılında Transit çalışmaya başladıktan sonra yukarıda belirtilen sınırlamalarından dolayı Transit sisteminin de geliştiricileri olan John Hopkins Üniversitesi Uygulamalı Fizikler Laboratuvarı'nca Transitin varyasyonları önerildi. Eşzamanlı olarak 1972 de NRL (Naval Research Laboratory) çok hassas saatli uydu projesi olan Timation'ı geliştiriyordu. İlk Timation uydusu quartz-kristal osilatör kullanırken daha sonraki modelleri rubidium ve cesium atomik saatlerini kullandılar. Transit'le başlayan bu öncü çalışmalar GPS için önemli bir temel oluşturdu. GPS için üçüncü bir temel çalışma da A.B.D. hava kuvvetlerinin 621B isimli üç boyutlu navigasyon sistemi projesi olmuştur. Bu sayede de PRN (Pseudorandom noise) temelli sinyallerin uydu mesafesi ölçümünde kullanılabileceği gösterilmiştir.
1973 yılında A.B.D. Savunma Bakanlığı, Hava Kuvvetlerini mevcut çalışmaları birleştirip yukarıda belirtilen temel ölçütleri karşılayacak şekilde geliştirmesi için yetkili kılarak 1 Eylül 1973'te Navstar GPS JPO (Joint Program Office) yönetiminde çalışmalara başlanmıştır. Bu projenin Navstar isminin çağrıştırdığı navigasyon işlevinden daha kapsamlı olduğu gerekçesiyle General Hank Stehling tarafından ismine GPS eklemesi yapıldığı belirtilmektedir.
Proje 1973-1979 döneminde Kuramsal Kanıtlama, 1979-1985 döneminde Geliştirme ve Sistem Test, 1985'ten günümüze Üretim ve Konuşlandırma olmak üzere üç evreye bölünmüş ve 1995 sonbaharında 24 GPS uydusu ile tam olarak işlevsel duruma geçmiştir.
Bu yazıda Rus uzay tabanlı radyonavigasyon sistemi
olan GLONASS'tan detaylı olarak bahsedilmeyecektir. En son belirtilenlere göre
bu sistemin de amaçlanan 24 uydudan 22sinin konuşlandırılmasının
tamamlanarak son aşamalara geldiği anlaşılmaktadır. NavStar GPS yerine de
GPS kısaltması kullanılacaktır.
GPS sistemi konum ve hız bilgisini doğru, sürekli, küresel ve üç boyutlu olarak uygun almaç donanımına sahip kullanıcılara sunmaktadır. GPS ayrıca bir çeşit UTC (Universal Time Coordinated) zaman bilgisini de sağlamaktadır.
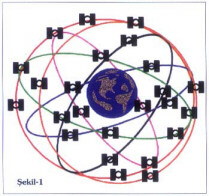
GPS sistemi Uzay Bölümü, Denetim Bölümü ve Kullanıcı Bölümü olmak üzere üç ana bölümden oluşmaktadır. Uzay Bölümü, dünya yüzeyinden yaklaşık 20000 km yükseklikte 6 yörüngede, her birinde 4 adet olmak üzere 24 adet uydudan oluşmaktadır (Şekil-1). Her uydu 24 saatte dünya etrafında iki tur atmaktadır.
 |
Denetim Bölümü, ana denetim istasyonu ve dünya
üzerinde dağılmış uyduların sağlığını ve durumlarını
izleyen gözlem istasyonlarından oluşur. Ana denetim istasyonu izleme
ve uydu yerleşimini yönetme ile navigasyon verisinin güncellenmesinden
sorumludur.
Kullanıcı Bölümü GPS uydularının kodlarını çözebilecek özel alıcılardan oluşmaktadır. Bu alıcılardan daha detaylı olarak ileride bahsedilecektir. |
GPS sınırsız sayıda kullanıcıya hizmet verebilir. GPS almaçları pasif olarak çalışırlar (pusula gibi). Sistem tek yönlü olarak ulaşma zamanının ölçümü ilkesine göre çalışır. Uydular yayınlarında üzerlerinde bulunan çok yüksek doğruluklu ve GPS zamanıyla senkron olan atomik saati referans alırlar. Uydu kod bölmeli çoklu erişim (code division multiple access) tekniğini kullanarak L1(1575,42 MHz) ve L2(1227,6 MHz) olmak üzere iki frekansta mesafe kodu ve navigasyon verisi yayımlar. Her uydu bu frekanslarda yayın yapmakla birlikte farklı bir kod kullanır. Bu kodlar düşük çapraz-ilinti (cross correlation) fakat yüksek öz-ilinti (auto-correlation) özelliklerine sahiptirler. Navigasyon verisi, alıcının uydunun yerini yayımı anında belirlemek için gerekli bilgiyi içerir. Bununla birlikte mesafe kodları da uydunun yayımının kullanıcıya geliş süresini belirlemede kullanılır. Böylece uydu-kullanıcı arası mesafe belirlenmiş olur. Alıcılarda almacın fiyat, basitlik ve boyutları dikkate alındığında uydularda kullanılan türden yüksek doğruluklu, pahalı saatler yerine kristal saatler kullanılır. Böylece kullanıcının enlem, boylam ve yükseklik ve saatinin offseti bilinmeyenleri için dört uyduya gerek duyulur (dört bilinmeyen dört denklem). Bu bilinmiyenlerden ne kadarı önceden biliniyorsa dört uydudan o kadar eksiği kadar uyduya gereksinim var demektir.
GPS iki farklı kalitede hizmet sunmaktadır: Standart Yerbulum Servisi (SPS) ve Hassas Yerbulum Servisi (PPS). Bunlardan SPS sivil kullanım için belirlenmişken, PPS askeri amaçlı olarak kullanılmaktadır. PPS'ye erişim çeşitli kriptolama özellikleri ile denetlenerek kullanımına sınırlama getirilmektedir. Bu mekanizmalardan birisi olan AS (antispoofing), bir tür karıştırma (jamming) tekniği olan yanıltma (deception jamming)'ya karşı bir önlemdir.
PPS de yatay düzleminde 22m (2drms,%95) ve düşeyde 27,7m (%95)'lik bir doğruluk değeri belirlenmiştir. Bu değerler bir noktada yapılan tüm yerbulumların %95'inin o noktayı merkez alan 2drms yarıçaplı dairenin belirlediği alanın içinde olacağını göstermektedir. PPS'in sağladığı zaman transfer doğruluğu 200nsn (%95) ve hız ölçüm doğruluğu da 0,2m/sn dir.
SPS de yatay düzlemde 100m (2drms,%95) ve düşeyde 156m (%95) duyarlılıklarına
sahiptir. SPS'in sağladığı zaman transfer doğruluğu 340nsn (%95) dir.
SPS'in düşük doğruluğunun en başta gelen nedeni A.B.D. Savunma Bakanlığı'nın
SPS verisine uyguladığı SA (Selective Availability) yöntemidir. Bundan amaçlanan
SPS için en azından yerbulumsal doğruluk ölçütleri dikkate alındığında
PPS'le aynı düzeye gelmemesini sağlamaktır. Fakat aşağıda DGPS kısmında
görüleceği gibi SA'nın getirdiği bozum ortadan kaldırılabilmektedir.
İki boyutlu olarak düşünürsek, bir sinyal kaynağının saati ile saatimiz senkron ise ve sinyal kaynağının konumunu önceden biliyor isek kaynağın yaydığı sinyalin bize geliş süresini ölçüp bu değeri bulunduğu ortamdaki yayılma hızı ile çarptığımızda kaynağa olan uzaklığımızı bulabiliriz. Bu sinyal havada yayılan bir elektromanyetik dalga olduğunda, hızı ışık hızına eşit olmaktadır.
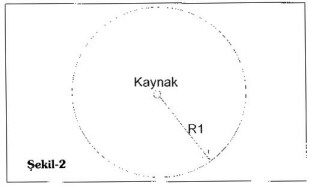 |
Doğaldır ki bu durumda ortaya çıkan konumumuz tek bir nokta değil, merkezi ilgili sinyalin kaynağı olan ve çapı daha önce bu kaynağa uzaklığımız olarak hesapladığımız değer olan Şekil-2'de gösterilen bir daire olacaktır. | |
| Eğer ikinci bir kaynak varsa çözüm Şekil-3'teki A ve B gibi iki noktaya indirgenmektedir. |  |
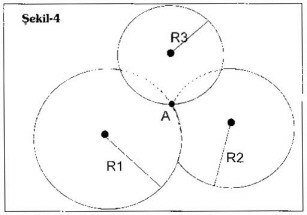 |
Eğer üçüncü bir kaynak daha kullanılırsa Şekil-4'teki gibi biricik bir çözüme (A noktası) ulaşılabilir. | |
Yukarıda belirtilen örneği üç boyutta ele alırsak, tek sinyal kaynağının oluşturduğu çözüm kümesi kürenin yüzeyi, iki sinyal kaynağının oluşturduğu çözüm kümesi bir daire, üç sinyal kaynağının oluşturduğu çözüm kümesi de iki nokta olacaktır. Dünya üzerinde bir kullanıcı içinde bu iki noktadan en yakın olanı çözüm olarak alınacaktır.
Yukarıda belirtilen yerbulum yöntemi ideal bir duruma karşılık gelmektedir; sinyal kaynağı ile kullanıcı saatleri tam anlamıyla senkrondur, sinyal kaynaklarının yeri hassas olarak bilinmektedir ve sinyalin yayıldığı ortamdaki hızı değişmemektedir.
| Eğer bu varsayımlardan yalnızca birisinin, sinyal kaynakları ve kullanıcı saatleri arasındaki senkronizasyon bozukluğu (offset) dikkate alınıp sırasıyla t1, t2 ve t3 ile belirtilir ise bunlara karşılık gelen uzaklıklar t1xc, t2xc, t3xc (c:ışık hızı) olacaklardır (örneğin 1 mikrosaniyelik bir fark 300m'lik bir hataya neden olabilmektedir). Bu durum Şekil-5'te üçgenin oluşturduğu bir belirsizlik alanı olarak ortaya çıkmaktadır. | 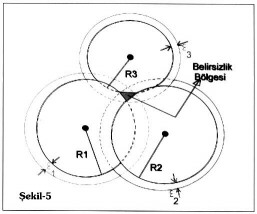 |
GPS uydu yayınlarında DSSS (Direct Sequence Spread Spectrum) modülasyonu kullanılmakta dır. DSSS, mesafe sinyalleri ve navigasyon verisinin yayımı için bir yapı oluşturmaktadır. Mesafe sinyalleri uydu taşıyıcı frekansını BPSK (Binary Phase Shift Key) olarak modüle eden PRN kodlarıdır. Rasgele ikili sıralarınkine benzer spektrumu olan bu kodlar aslında tamamen deterministiktir.
Her GPS uydusu iki tür PRN kodu yaymaktadır: C/A-kod ve P-kod. C/A (coarse/acquisition) kodu 1-msn periyodlu 1023 chip'ten (bu kodlar veri taşımadıklarından 'bit'ten farklı olması için literatürde 'bit' yerine 'chip' kavramı kullanılmaktadır) oluşan chip frekansı 1.023MHz olan ve sürekli olarak tekrarlayan bir koddur, bununla birlikte P-kod chip frekansı 10,23MHz olan 7 gün uzunluğunda ve her Cumartesi'yi Pazar'a bağlayan gece yarısı tekrarlayan bir koddur. P kodu kriptolanarak P(Y) kodu olarak yayınlanmaktadır.
 |
Şekil-6'da kullanıcının konumunu ECEF koordinat sistemi orijinine göre belirleyen u vektörünü bulmak istiyoruz. Burada r vektörü kullanıcıdan uyduya olan vektör, s de uydunun konumunu yine ECEF orijinine göre tanımlayan vektördür. s vektörü uydunun gönderdiği kendi yörüngesine ilişkin veriden belirlenebilmektedir. r mesafesi uydunun oluşturup gönderdiği PRN kodun yayılım süresi hesaplanarak bulunabilir. Örneğin t1 anında uydunun gönderdiği kodun t2 anında kullanıcıya ulaştığı varsayılırsa yayılım süresi t2-t1 olacaktır. | |
Üç boyutta kullanıcı konumu ve saat kayması belirlenmesi için dört uydudan alınan ölçümler yeterli olmaktadır.
GPS, kullanıcı hızının üç boyutlu olarak belirlenebilmesini olanaklı kılmaktadır. Bu amaçla birkaç yöntem kullanılmaktadır. Bazı almaçlarda hız, kullanıcı konumunun yaklaşık bir türevi alınarak saptanmaktadır.
du/dt~[u(t2) - u(t1)]/(t2 -t1 )
Bu yaklaşım kullanıcı hızının seçilen bir zaman aralığında sabit
ve u(t2) ve u(t1) konumlarındaki hataların u(t2)
- u(t1) farkı ile kıyaslandığında göreli olarak küçük
olabildiği koşullarda geçerli ve gerçekçidir.
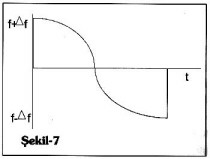 |
Bir çok modern GPS almacında hız ölçümleri taşıyıcı fazı ölçümlerinin işlenmesi ile yapılmaktadır böylece uydudan alınan sinyalin kullanıcıya göre Doppler kayması hesaplanmaktadır. Şekil-7'de kullanıcı hareketsiz iken alınan bir Doppler frekansı görülmektedir. |
Her bir GPS uydusunun sürekli olarak yayınladığı yöngüdüm mesajı (Nav-msg)
hem P kodunda hem de C/A kodunda bulunan 50 bit/sn hızında bir iletidir. Nav-msg
her biri 1500 bit'ten oluşan 25 veri çerçevesinden oluşmaktadır. Dolayısıyla
bir almacın bir veri çerçevesini alması 30 sn, tüm mesajı alması da 12,5
dk sürmektedir. Her bir veri çerçevesi 5 altçerçeveden oluşup 1.,2. ve 3.
altçerçevelerdeki 900 bit'lik veri her 25 veri çerçevesinde de
yinelenmektedir. Böylece almacın kritik yöngüdüm iletisini 30sn içinde
alabilmesi sağlanmaktadır. Yöngüdüm iletisi; yayımın GPS sistem zamanı,
C/A koddan P koda geçmek için kullanılan HOW verisi, yörünge ve saat düzeltme
verisi ile almanaktan oluşmaktadır.
GPS ile yapılan 'pseudorange' ölçümlerinde karşılaşılan belli başlı hata kaynakları :uydu saati hataları, uydu yörünge tayini (ephemeris) hataları, SA (Selective Availability), rölativistik etkiler, atmosferik etkiler (İyonosferik ve troposferik gecikme), almaç gürültüsü, yansıma ve gölgeleme etkileridir.
Tüm bu hataların kullanıcı eşdeğer mesafe hatasına (UERE) göre 1-sigma standart sapmaları PPS ve SPS almaçları için Tablo-1'de verilmiştir.
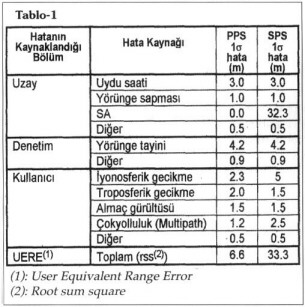
Tablo-1'de verilen tüm bu etkilerin yanında kullanıcının yerbulum için kullandığı uyduların oluşturduğu geometriden kaynaklanan (DOP: Dilution of Precission) paramler de etkilidir. Uygun seçilmiş bir uydu geometrisi için PDOP paramsinin genellikle 6 değerinden küçük olması istenir.
Sonuç olarak (GPS yerbulum hatası)= (Geometri faktörü) X (Pseudorange
hata faktörü) olarak kabaca ifade edilebilmektedir.
SPS'de yaklaşık doğruluklar yatay düzlemde 100m (2drms,%95) ve düşeyde 156m (%95) olarak öngörülmüştü. Fakat birçok sivil uygulama için bu değerler yeterli olmamaktadır. Bu doğruluk değerlerinin bu düzeylerde olmasında uydunun yörünge bilgisi ve C/A saat frekansının bilerek bir miktar bozulması olarak tanımlanan SA faktörünün önemli bir etkisi vardır. Eğer SA olmasaydı, doğruluk değerlerinin yatay düzlemde 25m (2drms,%95) ve düşeyde 43m (%95) olabileceği belirtilmektedir. DGPS (Differential GPS) diye adlandırılan bir teknik kullanılarak SA'sız bir SPS'ten daha iyi doğruluk değerleri elde etmek mümkün olmaktadır.
 |
Bu yöntemde Şekil-9'da görüldüğü gibi konumu daha önceden hassas olarak bilinen sabit bir referans istasyon görebildiği tüm uyduların sinyallerini alarak hataları belirlemekte ve bu bilgileri etki alanındaki GPS almaçlarına belli bir formatta (RTCM SC-104) bildirerek ölçümlerinin daha doğru olarak yapılması amaçlanmaktadır. Çok başarılı sonuçlar da elde edilmektedir. |
| Tablo-2'de bu durum açıkça görülmektedir. Bu hataların grafik olarak karşılaştırılması da Şekil-8'de gösterilmiştir. Bununla birlikte kullanıcı ile referans istasyon arasındaki mesafe arttıkça doğruluk değeri düşmektedir. | 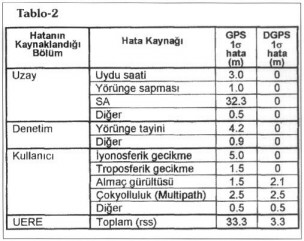 |
|
Bunun belli başlı nedenleri referans istasyon ile kullanıcının gördüğü yörünge paramlerinin ve iyonosfer ve troposfer gecikmelerinin farklılaşması olmaktadır. 100km'yi aşan uzaklıklarda DGPS'in beklenen doğruluğu veremediği belirtilmektedir. Tüm A.B.D. boyunca standart DGPS katkısını sağlamak için 500den fazla referans istasyona gerek duyulacağı hesaplanmıştır. Bu pratik zorluğu yenmek için bir ana istasyon, yeterince yerel istasyon ve aralarındaki haberleşme ağından oluşan WADGPS (Wide Area DGPS) teknikleri ortaya atılmaktadır. Bu sistemde her yerel istasyon yüksek kaliteli rubidyum saatlerle donatılmış olarak görüş alanındaki uyduları izlemekte ve bilgileri ana istasyona gönderilmektedir. Ana istasyon da bu verileri uygun bir formata sokarak uydu, telefon veya telsiz gibi hatlar aracılığıyla kullanıcılara ulaştırmaktadır. Halihazırda A.B.D.'de özel WADGPS servisleri vardır.
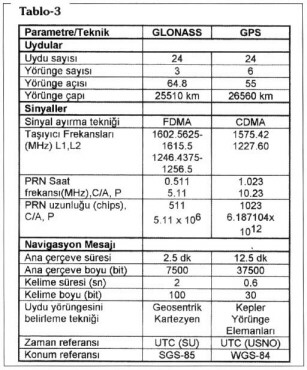
Bu karşılaştırma ana hatlarıyla Tablo-3'te verilmiştir.
Askeri amaçlı kullanımı düşünülerek gerçekleştirilen GPS sisteminin
sivil amaçlı kullanımı daha büyük boyutlara ulaşmıştır (%90). Ücretsiz
sivil kullanımın da 2005 yılına kadar garantilendiği belirtilmektedir.
Belli başlı ve ilginç kullanım yerleri aşağıda sayılmakla birlikte düşlemle
sınırlı olduğu söylenebilir. Bunun dışında kritik uygulamalarda GPS tek
başına kullanılamamakta fakat bir destek aracı olarak hizmet vermektedir (GPS-INS
gibi). JPO'nun Direktörü Mike Wiedemer'a göre GPS'in bugünkü olgunluk
durumu 1940'lardaki radarınkine benzetilmektedir.
Askeri Uygulamalar:
Sivil Uygulamalar:
 |
1965 yılında Ankara'da doğan Erdoğan TOHUM, Hacettepe Üniversitesi Elektrik-Elektronik Müh. Bölümünden 1987 yılında mezun olmuştur. 1990 yılında ODTÜ Elektronik Müh. Bölümünde Kontrol Sistemleri dalında yüksek lisans programını tamamlamıştır. 1988-91 yılları arasında aynı bölümde Araştırma Görevlisi olarak bulunmuştur. Halen MST Grubunda Elektronik Donanım Müdürlüğü/Analog Tasarım Biriminde görev yapmaktadır. |