The actuator is a cheap and heavy tool with high enough torque, ideal for elevation systems, but in practice it needs quite an effort in order to operate correctly in your homebrew antenna system.
This page will try to inform you of the actuator's secrets.
|
| FIG.1 |
There are several models of TVRO actuators in the market place. They have differences in the "length" and the voltage supply. Depend on the manufacturer, the majority of models are between 8 - 36" (inches).
|
| FIG.2 |
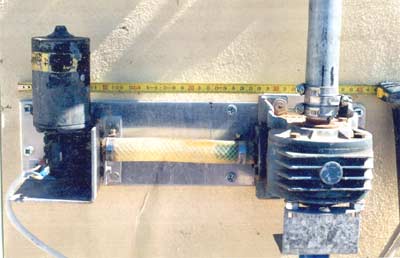
The picture above (FIG.2) shows the dimensions of 12" actuator and the following "animation" (FIG.3) shows how it works.
|
FIG.3 |
I've used on my satellite antenna this size (12"), because it's pretty good and cheap ( 35 Euros) for small-medium elevation systems, like U/S. In case you're wondering what that 12" means, well... the actuators have a main-stable section (Arm) with motor, gear-box etc. and a linear-movement section, which expands from the main section (Arm) by about 12 ". The "18" model by 18" etc.
 How it works ?
How it works ?
As I said before, the actuator includes a DC motor, a gear-box and the final wormscrew in order to transform the motor's round in linear actuation. Thus, when that is fed with normal DC Voltage polarity, the length of actuator expands ( "Yellow" section as shown on FIG.4 ). By supplying the motor with "reverse polarity", the actuator's "length" reduces.
|
| FIG.4 |
In order to operate the motor needs 12-36 Volts, depended on the model. I use a 36V model. This way I achieve smaller current in the feed cable between shack and antenna (see details below on "Voltage Supply") . On the other hand, the motors of actuators are very sensitive... in my system with just 12 V (0.25 A) the elevation moves very slow. That is very useful in small corrections of elevation angle, especially useful operation for HEO satellites, when these is near to apogee . With 36 V supply the elevation is moving faster, ie if you need a quick change
between 0-90°. In practice I don't supply my actuator with maximum voltage (36V). I 'm using 12-24 V range.
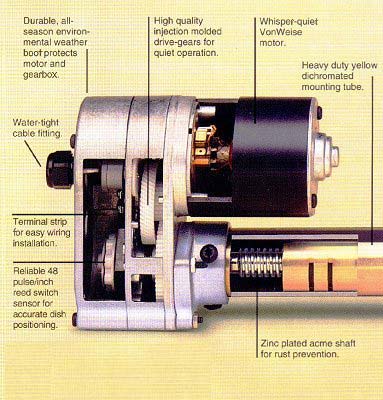
"Inside world" of Hi-Quality TVRO actuator.
 Voltage Supplying
Voltage Supplying
Actuators need a voltage supply between 12-36 V, depended on the model. If your actuator is 12 V, you can feed it that from
your Base Power-Supply (13.8V) into the shack.
But, when actuator "turns-on" , the power demand is very high. These strong "current-peaks" during the actuator's starting-point is a problem and sometimes the "peak" value of electrical current is 5 - 10 times greater than normal current's consumption.
In order to protect the "On-Off" switch, the motor and especially the Power Supply's "Over current" (short-circuit) protection, which is usually activated by these current-peaks, we can add a lamp in series with positive cable and thus limit the current. That way, the "current-peaking" decreases. In practice the LP is acting as a simple "Soft-Start" circuit.
Any Car-Lamp above 5 W is OK for that, depend on the actuator current. Some actuators have high enough current consumption (up to 2A), so the "current-peaking" may be up to 10-20 A !
In this case you need a lamp with higher current.
If you can't calculate the Power of the Lamp, just follow this simple method:
connect the lamp beginning from 5 W...if the lamp is being lit on starting and then it quenches slowly, it's OK. If the lamp's light continues during the actuator movement and remains stable, you need a higher power lamp. But keep in mind, that 5 W is a mere example. The lamp's power depends on the current consumption of actuator, the voltage supply etc. The lamp of "5 W" is not a rule for all models.
Additionally, the lamp's voltage depends on the actuator's voltage source. For 12 V Actuator use 6 - 12 V lamp. For 24 V use 12 - 24V lamp .
|
| FIG.5 |
FIG.5 shows a pretty simple circuit which manipulates the 12V TVRO Actuator for "Up" & "Down" manual operation.
S1 is a double ON-OFF-ON button-switch. On the center position is normal - OFF. The other contacts are used for "UP" & "Down". By pushing S1 to "Up", normal polarity is fed to the actuator's motor through the feed cable. In this case, the actuator expands and the Elevation increases.
Reversely, when the S1 is pushed to "Down", the actuator's motor is supplied with reverse-polarity. Thus, the actuator's length decreases.
A
|
| FIG.6 |
FIG.6 above shows another circuit for "Up-Down" control with relays.
This circuit makes possible the Manual or Remote control of the Actuator.
By pressing B1, B2 buttons we have Manual control of elevation system.
Remoting control is possible if the A or B point is grounded through an "open" collector (emitter grounded) driver-transistor, which is triggered from some suitable electronic circuit (see FodTrack or similar).
For example, If point "A" is grounded, RL1 is activated and the actuator's motor is supplied with normal polarity. Thus, the elevation is increasing.
The opposite happens if the point B is grounded ( RL2 active).
"D" is a usual silicon diode, like 1N4003, 1N4004 etc.
Keep in mind that, the circuit has protection through relay contactors for Manual operation, so if the RL1 is in operation, RL2 cannot be activated and the opposite (RL2 in operation, RL1 cannot activated). So, if by any accident are pressed the buttons B1 & B2 simultaneously, only one relay is being activated.
That, is absolutely necessary in Manual operation.
Otherwise if both buttons are pressed in the same time and the two relays activated simultaneously, there will be as a result a "short circuit" between positive and negative of Power Supply !
The "remote control" ability of this circuit is useful for external control of the Actuator through a Satellite tracking program. For example, with FODTRACK PCB and this relay-circuit it's possible to drive any actuator. (Fodtrack connector: pin3 to "A" & pin 5 to "B")
The voltage rate + 5V (in practice 5-6 V) is just an example. In this case the RL1 - RL2 are for 6V DC. Certainly, any relay with different Voltage, ie 12 V DC can be used without any problem and that depends on the voltage supply of the Elevation circuit system.
Generally, any combination or modification is possible, because the circuit is simple and flexible.
The combination with lamp (LP) as described above for "Soft Starting" is simple, efficient and effective. But if you want a more
sophisticated method, OR your actuator is not 12 V, then it is necessary for you to use an indepedent Power Supply.
FIG.7 shows a simple power supply for actuator feeding, with LM317T IC-regulator.
The LM317 has a great advantage for this application, because it includes Internal Current-Limiter ! Thus, the maximum-allowed current in output is up to 1.5 Amperes (for LM317T). This way, the LP is not necessary.
Additionally, the LM317 offers variable voltage output (adjusted by P1) and it is able to supply any model of Actuator, between 12-36 Volts and Maximum current consumption up to 1 - 1.2 Amp.
Generally, the LM317T is an adjustable 3 terminal positive regulator capable of supplying in excess of 1.5 Amps over an output range between 1.2 - 37 Volts. It has also built-in Current Limiter and Thermal Shutdown. The "Input" voltage must be 3-4 Volts higher (or more) than the "Output" Voltage, but it should not exceed the 40 Volts (= maximum input).
Output voltage is set by the resistor divider R1, R2 (where R2 = R+P1 on FIG.7).
The Output voltage can be approximately calculated by the following formula:
Vout = 1.25 * ( 1 + R2 / R1 )
Because I've used as R2 a combination with pot ( P1) and stable resistor ( R ) the divider is semi variable, in order to take variable output between 8 - 14 or 12 - 24 Volts Output (see FIG.7 for details about P1 & R values).
The only necessity is that: the "Input" Voltage ( Pin 1 or across C1) must be 3-4 Volts higher than the "Output" voltage but
keep in mind: maximum "Input" voltage for LM317T = 40 V.
Thus, for 24 V output, it is necessary a voltage input 27-28 V (Pin 1 of LM317). For 12 Volts Output, 15-16 V Input. So, keep in mind, the secondary of TR1 must be selected with that presupposition and of course, the transformer's power should be large enough to keep the "Input Voltage" 3-4 Volts above the output at full load.
This circuit has additional care against transients.
As you know, any motor, like that, which includes the actuator, is a very-very "Bad Load" for Electronic circuits. In addition, we have a long feeding cable between the Power Supply and the Actuator, usually with unwanted inductive effect. So, in order to operate the LM317 without problems, it is necessary the diode D, the Zener DZ, the cap C3 & the ferrite FB. These components prevent unwanted transients, "Peaks" etc. and finally help the LM317 regulator to operate with stability.
The DZ zener diode must be about 4-5 Volts higher from the maximum Output Voltage. For example, if your actuator is fed with 12 V, then DZ= 16 V/ 1W. If your Actuator is fed with 36 V, DZ=40 V etc.
(This Zener Diode is not "Over-Voltage" protection in the Output of LM317. It working in order to prevent any Voltage-peaking or transient from feeding-cable to LM317 ( reverse path). Thus, the LM317 circuit is protected against to any actuator-motor's "sparks").
Using this circuit you have another benefit:
the variable Output-voltage through P1 helps the Actuator in order to operate with variable-speed. Thus, if the voltage is reducing, it is possible to have "slow-motion" of the Elevator system, for small corrections of the Elevation angle.
|
 |
Output 8 - 13.8 Volts
R=1K2
P1=1K
Output 11.5 - 24 Volts
R= 1K8
P1=2K2
|
| FIG. 7 |
Finally, keep in mind that about LM317T: the Pin 2 has internal connection with metal body of case (TO-220).
So just be careful if you put a Hotsink into IC-body! It must be "isolated" from Negative (GND). Otherwise the "output" of LM317 will be connected in the ground (= short circuit !) through Hotsink, if that is grounded.
This PS has intermittent operation for Actuator's suppling with low duty-cycle. Thus if your actuator's consumption is below 0.3 Amps, there is not any necessity of Hotsink. If the current is bigger than 0.3 Amps,
a small Hotsink helps the LM317.
In case your actuator has bigger current consumption, ie between 1-2 Amps, it is possible to replace the LM317T with the LM350T.
The LM350T has the same case (TO-220) & characteristics with LM317, but the Maximum Current Output is up to 3 Amps (and in any case required a Hotsink).
 Lower-Upper Limits
Lower-Upper Limits
The actuators have two adjustable limit-switches (stopper) inside the bottom cover of the gear-box. Thus, you can adjust the Upper (90°) and the Lower Limit (0°), in order to protect the mechanic parts of elevation system from any possible damage (bracket's broken, etc).
Any damage is possible if the actuator moves the mechanic parts over-limit.
 | |
| FIG.8 : Bottom view of Actuator's gear-box |
By using the limit switches, the elevation system will moves between 0-90° angle, safely.
For example, when the actuator goes to the Upper or Lower limitation, the limit-switch "cuts-off" the motor's voltage supply.
Then, you must reverse the voltage polarity, so that it moves again (reversely).

( I have here a PDF- file {85KB} of my Actuator's instructions sheet. Have a look.)
I've received an Email, that mentioned an Actuator without "Limit-switches". I've no idea about that, all actuators which I know have "Limit-switches" from manufacturer. If you have actuator without switches, you can add a pair of external, in order to protect your Elevation system from possible damage.
Keep in mind: the elevation angle of 0-90°, that a system with actuator offers, is in practice a disadvantage compared to a rotator system for Elevation, which can offer 0-180° arc (that named "Flip-Mode").
So, if the satellite pass is overhead, the elevation system with actuator can not follow the satellite continually, into the arc of 0-90°-180°, between AOS - TCA - LOS !
Firstly, the Elevation should be increased 0-90° and then, it must be rotated the azimuth-rotor 180° (in the opposite bearing). Then, the actuator decreases normally the elevation from 90-0°... with this combination we can follow the satellite on overhead pass. This problem doesn't exist with double-rotator, but on LEO satellites the majority of orbits are not "overhead", so it doesn't matter !
In practice, the arc that offers a system with actuator and corner-hinge* (*see picture below) is more than 90°. We can move the elevation up to 135°, but in
any case, that is not enough for "overhead" passes.
Theoretically a possibility of covering the arc 0-90-180° continuously,
exists by using the system of piston rod (like car's engine), but the construction is much-more complicated.... in practice it is
unnecessary for 1-2% of passes, which is "overhead" (exactly 90° Elevation).
 About the "degrees" readout:
About the "degrees" readout:
The actuators include a reed-switch and the axial of motor has a magnet-head. This way a number of pulses during the actuation are generated. Generally, the usual TVRO actuators generate about 48 pulses per inch .
TV Satellite receivers have the capability of measuring these pulses.
Converting them in
degrees, the Elevation is shown on front panel of SAT receiver .
Unfortunately, in our homebrew systems that is not too easy to achieve!
The majority of SAT-tracking programs need variable voltage (and not pulses !) in order to read the "position" of Elevation-system. So, here we have a small problem with actuators !
I've made a digital-counter for that, but in practice it is much-more complicated. Maybe
the easy solution is by using a PIC or STAMP working as decoder, but I'm
not a
programmer, I can't do that.
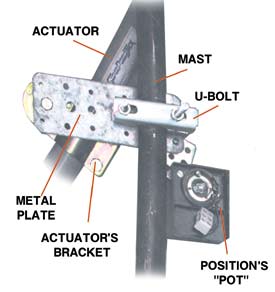
So, if you want to make a system with automatic tracking from a Satellite Software, I suggest the usual simple solution: a potentiometer close to elevation parts,
which is moving in step with the elevation-arm.
There are several combinations, in order to couple the Elevation-bracket with a potentiometer
for position-reading. For example, use a small weight on a pot
with an arm and let gravity give you the zero reference.
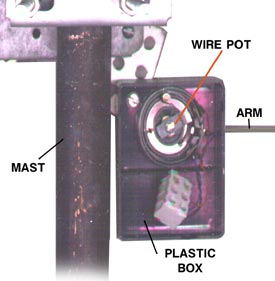
The "fishing-line" is also very useful for this job. By using small fishing-weight (sinker), fishing-line and a small wheel in the axis of potentiometer, this way it is possible to convert easily the Elevation degrees in variable voltage.
In other words, when the elevation goes Up or Down, the fishing-line turns right or left the wheel and thus, moves the runner of potentiometer.
Some reports said that: the wheel is very rare... I don't think so. You can find this from old radios. The wheel was on variable capacitor, so you may already have one , into your "junk-box"!
Another more sophisticated technique is shown on the following Picture (it's from Internet but very sorry, I can't remember the URL)

This method uses a small "reduction-gear", probably from some childish toy, in order to reduce the motor's rotation... this way it's possible to use for read-out a multiturn pot into actuator's gearbox. Pretty smart, but it always seems difficult to find a reduction-gear like this.
FIG.9 below shows a simple read-out diagram for Elevation systems. By using the P1 as described above, it is possible to read the Elevation angle through M1 in degrees, if calibrated that correctly, with excellent resolution ( 1°). The "red line" on FIG.9 shows the "outside" section.
In practice that is a double-cable (i.e. 2 x 0.5 mm) and the P1 potentiometer, which is coupled to any mechanically moving part of Elevation.
P1 & P2 are 5 KOhms linear pot's and P3 = 10 KOhm, also linear pot. P2 & P3 must be multiturn pot's, in order to adjust easily the "Low" and "Upper" limits.
M1 is not critical... any coil-meter between 0.1 - 1 mA is working fine.
Keep in mind, for the final adjustments, that there must be re-adjustments on the P2 & P3 pots several times, in order to have correct indications of the Elevation read-out into M1.
The method is:
a) set P2 & P3 about 1/3 from GND.
b) put your antenna in the highest elevation (upper limit, 90°) and adjust the P2 for maximum deflection of M1.
c) put your antenna into the minimum elevation (lower limit) and adjust the P3 for minimum deflection of M1.
You must repeat several times that (steps b & c), in order to be able to indicate into M1 full deflection for maximum Elevation and minimum for 0°.
|
| FIG.9 |

 ...more details about Elevation read-out
...more details about Elevation read-out
"click" here

Mechanical Parts
A difficult point for many Hams in the "homebrew" Elevation system is the engineering.
Sometimes our bench does not cover this challenge, we do not have the tools in order to construct metallic parts.
This page will try to help you with simple methods, without specialized tools, just by using a screwdriver, a drill and pincers.
I have wondered many times, how is possible that. My first simple idea is shown in the following pictures.
FIG.10 shows, how we can construct a "hinge", just by using 4 metallic corners, 2 metal plates, one screw-axis and several screws, nuts and U-bolts. (All that you can find in General-stores, ie "Practiker" for about 10 Euros)
This way the "tube" (cross-boom) can be moved in the perimeter of quadrant (90°), having as centre the "Axis" (the Elevator-Axis, as shown on Fig.10).
It is a great benefit if you can find some of the mechanic parts from heavy-duty Aluminium (ie the plates), because the Elevation mechanic section is in the Upper part of Mast.
Thus, if the weight on the top of mast is smaller, that is profit.
 |
| FIG.10 : Simple homebrew hinge for Elevation. |
The following picture shows, how the "hinge" works with the help of Actuator, in order to be able to vary the Elevation.
... and the picture below shows my first Elevator system with Actuator
(on my bench-without the Cross-Boom).
A great example of this system has been made by SW1IXP.
You can see on this page "click here" several photos and a short video about it.
Another method is shown in the following picture. By using two concentric tubes, GM4JJJ achieves to construct a simple & heavy-duty "hinge".
The outer tube is stable with U-bolts in the metal plate... the inner tube, which has smaller diameter slides inside the outer-tube with the help of grease.
This method is simplest than the previous ones, but it has friction between tubes.
On the other hand, is very heavy-duty, preferable for big antenna systems, like "multi-stacked Yagis", EME antennas etc.

Finally, the picture above shows an alternative, cheap, homebrew ROTATOR using a small "reduction-gear" and a motor from windscreen wiper (SV1EPE patent) ! The relationship in wormwell of reduction-gear is 360:1, so the Mast is moved easily from the small motor, without problem.
The "coupler" between motor and gear-box it's just a piece of hose !
That's all folks ! If you have any new idea, comment or suggestions about these Elevator systems, it is more than welcome. Just Email me.