Montando o Manipulador K8
Esta é minha versăo do excelente Manipulador Iâmbico K8 de autoria de K1EL, o artigo original pode ser consultado aqui.O código foi liberado pelo autor, podendo ser reproduzido desde que citada a fonte.
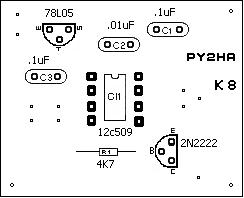
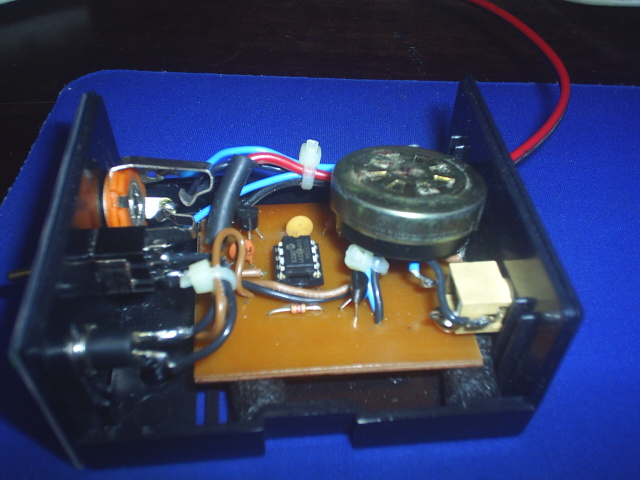
Foi montado com o PIC 12C509A, mas tenho também a versăo com o PIC16F84.
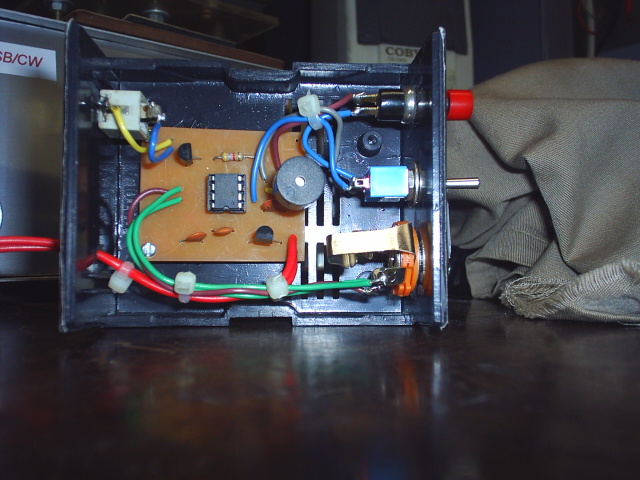
Apesar da simplicidade da montagem, depois de montado ele surpreende pelo funcionamento.
Elaborei uma placa específica para a montagem, mas pode ser montado em placa padrăo, ponte de terminais, estilo manhattan, estilo inseto morto, ou da maneira que for possível. O único cuidado que o autor recomenda é deixar o capacitor de 0.01uF o mais próximo possível dos pinos 1 e 8 do C.I..
Para a estabilizaçăo da tensăo de alimentaçăo coloquei um 78L05, e alimento direto com uma fonte de 13,8V, mas pode-se alimentar com pilhas já que o consumo é pequeno.
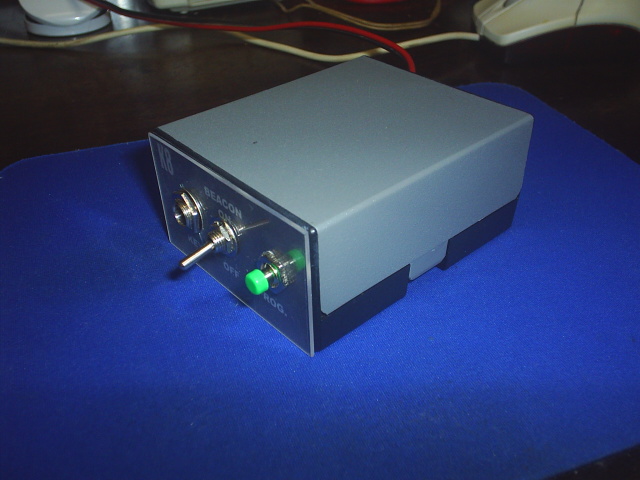
Nos que estou montando agora, já estăo indo com a funçăo "BEACON" habilitada.

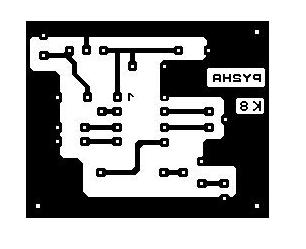
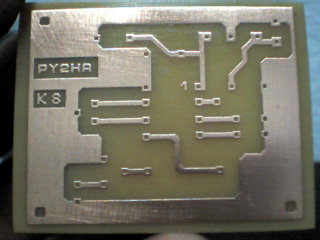
Esta placa fiz pelo método térmico.




<>
Abaixo uns vídeos que fiz mostrando alguns comandos do K8.
Ao desligar a alimentaçăo do K8, ele perde os dados inseridos via manipulador e retorna com os valores default gravados no PIC12C509A.
Para conhecer todos os comandos pegue aqui uma cópia do Manual.