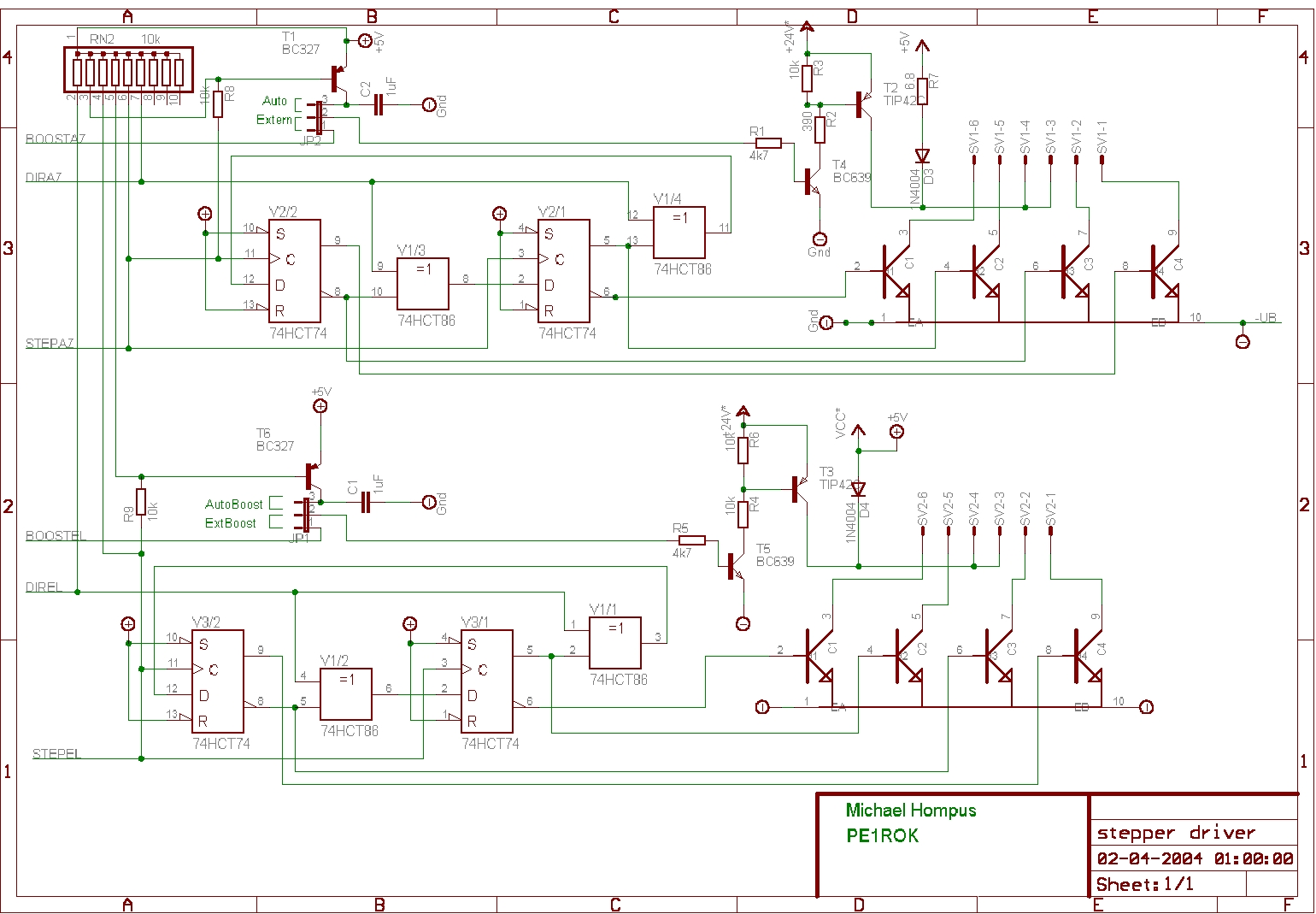
As you can see, I kept it simple. Only 3 chips are used to generate the pulse sequence for the coils of the 2 motors. The circuitry around the BOOST input might require some explanation. With the jumper the source of the boost signal can be selected. In the position external, raising the boost input causes the "high" voltage to be switched on. If the jumper is set to automatic, the 24 V is switched on by the falling edge of the PULSE input. In this case the controller should make a step by raising the PULSE input and leave it high. With the rising edge, the 24 V is switched on and the next output pattern is clocked into the '74 FlipFlops. After a short delay time (during which the motor makes the step, the 24 V is switched off again so the motor coils will not overheat. The transistors which I used came from the printer as well. The type numbers in the diagram just happened to correspond to usable parts in the component libraries of the layout saftware. Do not feel compelled to use the same. For the transistors in the main current path I suggest to use some PNP darlingtons. The other ones are small signal types. For the coil driver a ULN 2003 or similar would also be a good replacement if You do not have the original SanKen drivers.