11/3/01:
I wasn't doing much so I decided to write the code to control the servos to drive the camera turret. I got it working fine, but it takes a lot processor overhead to run since looping is used for the delays. A better, interrupt based version needs to be written.
11/1/01:
I worked on the RF link command set so that I can start writing actual code instead of just routines to perform small tasks. I also ordered some more PICs (2 16F627s and a 12C671), some MOSFETs and transistors for the H-Bridge, and resonators for the PICs and modem ICs.
10/28/01:
Worked on the drivetrain plans and pricing. It should cost about $160 for the track and sprockets. The track is special chain with right-angle flanges attached to the links which we will either use as is or attach track plates to. The chain is 12.30/ft for 50 gauge chain, so ten feet will cost $123. The sprockets are much more reasonably priced because we are purchasing them from a surplus distributor.
10/27/01:
Brandon has been working on getting a four-stroke R/C airplane engine. He found an O.S. FS61 for a low price which we will use as the auxilary generator. The engine should put out about 1HP, now we need to find a suitable generator to attach to it. An engine controller also has to be designed, because it will have remote start and shut down features, as well as automatic throttle control.
10/26/01:
The last couple of days more work went into the code for the joystick. The clock detection is still not working properly. It senses the first pulse (going low), but not when it rises again. This is really frustrating, because it almost seems that there is a problem in the actual execution of the code by the PIC. At these speeds (1us pulses) it is hard to look at stuff on our slow analog scope.
10/22/01:
Used our milling machine to cut the piece of aluminum we are using for the base of the chassis in half. It is about .1" thick, so we won't need a frame. We will weld the two plates together so that the 3/4" flange that was only on one side is facing outward to mount the sides to.
10/19/01:
I worked on the joystick interface to the PIC some more. I wired up a connector going from a 15 pin joystick connector to the breadboard with the PIC on it, then wrote some really simple code to tell the joystick to send data over the serial lines. It has a really strange interface (which I learned from the Linux joystick driver and the Microsoft patent). I wrote a program that pulses the X axis pin high for 15us, which triggers and interrupt in the joystick (according to the MS patent) and tells the joystick to send back data. I was really excited that this was actually working, and that I could see changes in the data when I pushed buttons or moved the joystick. Earlier stuff I had done (looking at the signals between the JS and the computer) showed that it wouldn't be this easy. However, each cycle is only 5us long, less than five instruction cycles at 3.4MHz (what the PIC is at now). I need to grab the values of three lines all in this time period, and do it as fast as possible. Needless to say, the clock speed will have to be increased. I plan to go to 20MHz, but of course I bought the cheap 4MHz 16F873's instead of spending a buck or two more to get the faster ones... fortunately I have some 16F872's which will run at 20MHz, but I am having problems getting the code to work on them. It's always something.
10/16/01:
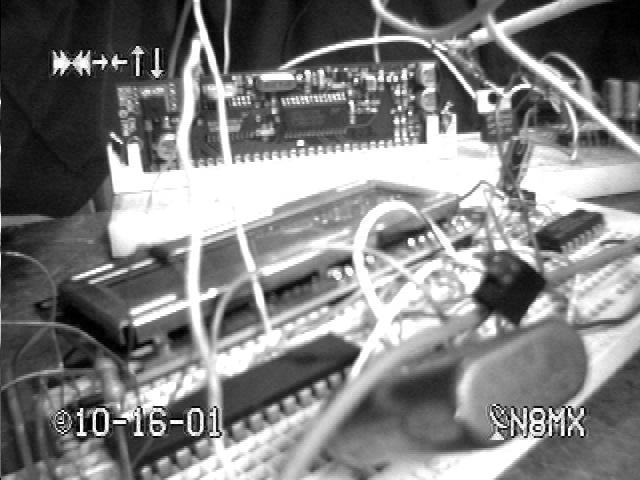
Justin came over to my house since we only had 1/2 day of school (PSATs), and we spent about 5 hours trying to get the PIC to send commands to the overlay board. We finally got it going, and the result is quite nice! Much of the time was spent trying to get the special characters working (arrows, clock, and sat dish are the ones we are using, but there are a bunch of others). See what a screenshot of the video looks like (it's really nice to be able to use a TV tuner card in the computer for testing!).
10/12/01:
We got the video overlay board this Tuesday (10/9). I hooked it up on Thursday night, and got it working easily. It works pretty well in local generation mode (blue background generated by the board). We had a black and white CCD camera laying around, so I hooked it up to the protoboard; it worked, and the overlay did also. Later Thursday night I hooked up the crosshair generator, and it also worked (I didn't know if it would)!
{kind=link}