|
GPS
Sistema de Posicionamiento
Global
DESCRIPCIÓN DEL SISTEMA:
El sistema global de posicionamiento (GPS por sus
siglas en inglés) es un sistema satelital basado en señales de
radio emitidas por una constelación de 21 satélites activos en
órbita alrededor de la tierra a una altura de aproximadamente 20 000
Km. El sistema permite el cálculo de coordenadas tridimensionales
que pueden ser usadas en navegación o, mediante el uso de métodos
adecuados, para determinación de mediciones de precisión, provisto
de receptores que capten las señales emitida por los
satélites. El GPS fue implementado por el Departamento de Defensa de
los Estados Unidos con el objeto de obtener en tiempo real la
posición de un punto en cualquier lugar de la tierra. Este sistema
surgió debido a las limitaciones del sistema TRANSIT que en la
década de los 70 proporcionaba posicionamiento usando métodos
Doppler. La principal desventaja del este último era la no
disponibilidad de satélites las 24 horas del día.
USOS EN NAVEGACIÓN:
|

|
La idea original del GPS, que aún hoy día se
mantiene, era usarlo para navegación. Esto es, conocer la
posición del observador en cualquier momento del día dentro de
un sistema de referencia creado para tal fin. Esto es conocido
como posicionamiento absoluto. La posición del receptor es
conocida a partir de las coordenadas de los satélites y las
distancias medidas a por lo menos cuatro satélites, mediante
una intersección espacial. La distancia a cada satélite es
determinada haciendo uso de la fórmula d = c* D t ; en
donde c corresponde a la velocidad de la luz en
el vacío y D t el tiempo de recorrido de la
señal desde el satélite hasta el receptor. |
|
GPSMAP 225 /
Garmin |
Evidentemente se necesita
proveer al sistema de un mecanismo de medida de tiempo. Tanto los
satélites como los receptores son provistos de relojes para tal
efecto. Debido a que no se puede tener un reloj perfecto, tanto los
relojes en el receptor y satélite poseen un error que afectará la
distancia medida, más si se considera la magnitud de las distancias
involucradas. Debido a que el intervalo de tiempo es calculado a
partir de dos relojes distintos, con errores diferentes, es que se
usa el término de pseudo-distancias para hacer referencia a las
distancias medidas.
La determinación de coordenadas en forma absoluta
presenta varios problemas. Además de los errores de reloj, se debe
considerar que en la medición de pseudo-distancias la señal
proveniente del satélite cambiará su velocidad de propagación al
atravesar capas atmosféricas de distinta densidad, lo que introduce
otro error en la posición. También, debe recordarse que la posición
de observación es determinada a partir de las coordenadas de los
satélites, la distancia medida, por lo tanto, también se encuentra
afectada por las distintas perturbaciones orbitales, que sacan a los
satélites de las órbitas teóricas. La exactitud en la determinación
de coordenadas absolutas con respecto al sistema de referencia es
entre 100 y 150 m en las tres coordenadas.
USOS EN TOPOGRAFÍA Y GEODESIA:
|
La posibilidad de usar el sistema para tareas
de precisión se ha estudiado desde hace mucho tiempo. En la
actualidad se han desarrollado técnicas para lograr exactitud
topográfica y geodésica. Estas son conocidas como técnicas
diferenciales o métodos de posicionamiento relativo. Esto es,
que es posible conocer con gran exactitud la diferencias de
coordenadas entre dos o más receptores. El principio se basa
en la hipotesis de que en ambos extremos de una línea los
errores de las órbitas de los satélites son iguales. |

|
|
GPS III Plus ( de
mano) / Garmin |
En este caso, los mismos satélites tienen que ser
usados en los extremos de la línea a medir. Además, mediante el uso
de receptores que captan las dos frecuencias de transmisión de las
señales, los errores debidos a la ionosfera pueden eliminarse. En
cuanto a la troposfera esta es considerada mediante el uso de
modelos atmosféricos adecuados. Mediante el uso de estas técnicas,
se pueden lograr precisiones menores a 1 m, y dependiendo del tipo
de procesamiento y equipo se puede llegar a precisiones del cm,
incluso de mm.
MODALIDADES DE MEDICIÓN:
Ya sea que el tipo de medición
sea absoluto o relativo, se consideran dos tipos de modalidad en la
manera de toma y procesamiento de las mediciones. Estas modalidades
son denominadas Estática y Cinemática. Como su nombre lo indica,
estática denomina a observaciones estacionarias, mientras que la
modalidad cinemática implica movimiento. A continuación se presentan
algunos tipos de estas modalidades (Hoffman-Wellenhof, Lichtenegger
y Collins, 1993):
ABSOLUTO ESTÁTICO: Esta modalidad es usada
cuando se desea posicionamiento de puntos de exactitud moderada, en
el orden de 5m a 10m. En este caso el modo de calculo es realizado
posteriormente.
ABSOLUTO CINEMÁTICA: Es generalmente usado
para la determinación de la trayectoria de vehículos en espacio y
tiempo con una exactitud de 10m a 100m.
RELATIVO ESTÁTICO: Cuando es usado por fases
portadoras es el método más aplicado en tareas de Geodesia. En esta
modalidad lo que se hace es determinar vectores o "líneas-bases"
entre dos puntos en los cuales se dejan receptores estacionarios.
Las precisiones logrables van desde 1 ppm hasta 0.1 ppm para puntos
separados pocos kilómetros.
RELATIVO CINEMÁTICA: Como en el método
anterior, éste involucra un mínimo de dos receptores, pero uno de
ellos estacionario y otro móvil realizando observaciones
simultáneas. Las precisiones logrables varían, de acuerdo al tipo de
receptor y postprocesamiento, desde el orden de pocos metros hasta
centímetros.
COMPONENTES DE LA SEÑAL:
Los osciladores a bordo de los satélites GPS
generan una frecuencia fundamental fo con una estabilidad
en el rango de 10-13 . Dos señales portadoras en la banda
L (llamadas L1 y L2) se generan mediante la multiplicación entera de
fo de la siguiente manera (Hoffman-Wellenhof,
Lichtenegger y Collins, 1993):
fo = 10.23 Mhz
Portadora L1 = 154 fo
= 1575.42 Mhz @ 19 cm.
Portadora L2 = 120 fo = 1227.60
Mhz @ 24.4 cm
Para lograr obtener las lecturas de los relojes, se
hace uso de dos códigos. Estos códigos se caracterizan por contener
en ellos un ruido pseudo aleatorio (PRN). El primero es el llamado
código C/A (Coarse adquisition) generado con una frecuencia igual a
fo/10, el cual se repite cada milisegundo. El segundo es
el llamado código P (o código Preciso) generado mediante una
frecuencia igual a fo la cual es repetida aproximadamente
cada 266.4 días. Las señales portadoras L1 y L2 son moduladas con el
código P mientras que el código C/A es modulado para la L1
solamente:
Código P : fo10 = 10.23 Mhz en L1 y
L2
Código C/A : fo = 1.023 Mhz en L1
FORMACIÓN DEL SISTEMA:
La descripción del sistema de posicionamiento global sigue la división acostumbrada para los sistemas satelitales
de navegación en tres segmentos: segmento espacial que se refiere a
la constelación de satélites, segmento de control que monitorea y
controla todo el sistema , y segmento del usuario que consiste de
los distintos tipos de receptores (Seeber, 1993). A continuación se
da una breve descripción de cada uno de estos segmentos.
SEGMENTO ESPACIAL:
La cobertura global de entre cuatro a ocho
satélites simultáneos en cualquier momento con una elevación de 15°
ha sido una de las metas fundamentales que se han tratado de
establecer por los diseñadores e implementadores de GPS
(Hoffman-Wellenhof, Lichtenegger y Collins, 1993). Esto puede ser
logrado mediante la planificación de una constelación adecuada de
satélites que hagan cumplir la condición deseada.
CONSTELACIÓN:
|

|
La constelación final y número total de
satélites ha sufrido variaciones con el tiempo. Los primeros
satélites GPS tenían una inclinación de 63° con respecto al
Ecuador y los planes era colocar 24 satélites en 3 planos
orbitales. Debido a cuestiones presupuestarias la constelación
se pensó reducir en 18 satélites. Con esta idea, sin embargo,
no se proveía la cobertura deseada (Hoffman-Wellenhof,
Lichtenegger y Collins, 1993). La constelación final de
satélites GPS se estableció en 21 satélites principales más
tres satélites activos de repuesto orbitando la tierra en
órbitas casi circulares a una elevación de aproximadamente
20200 Km. sobre la tierra y con un período de 12 horas
sidéreas. |
|
GPS 126 /
Garmin |
Estos satélites tienen una inclinación de 55°
con respecto al Ecuador y están colocados en seis planos
equidistantemente y con 4 satélites en cada órbita. La separación de
los planos de las órbitas es de 60° en ascensión recta (Seeber,
1993).
DEGRADACIÓN DE LA PRECISIÓN:
Existen dos formas para degradar la señal
emitida por los satélites GPS. La primera es llamada Selective
Availability (SA), y la otra llamada Anti-Spoofing (A-S).
El objetivo de ambas es negar a los usuarios el uso apropiado del
sistema.
Selective Avalibility: La limitación en este
caso puede ser lograda de dos maneras. La primera es mediante la
manipulación de los datos de las efemérides (método e ) y la segunda
mediante la desestabilización de los relojes del satélite (método d
) (Seeber, 1993). Ambos métodos afectan la medición de
pseudo-distancias.
Anti-Spoofing: Este método de degradación de
la señal consiste en encriptar el código P mediante el uso del
llamado código protegido Y. Solamente usuarios autorizados tienen
acceso al código P cuando el A-S es activado.
SEGMENTO DE CONTROL:
Este segmento consiste de una
red de estaciones que permiten controlar y retroalimentar el sistema
de satélites. Esto se logra mediante el constante monitoreo de los
satélites desde una serie de estaciones convenientemente ubicadas al
rededor de la tierra.
|
Existe una estación maestra de control
ubicada actualmente en el Centro de Operaciones Consolidadas
del Espacio, en Colorado Springs. En esta estación se reúne la
información de las estaciones de monitoreo y con estos datos
se calculan las orbitas de los satélites y correcciones a los
relojes haciendo uso de estimadores Kalman. Las estaciones
de monitoreo son cinco y se encuentran localizadas en
Hawaiii, Colorado Springs, Isla Ascensión en el Océano
Atlántico Sur, Diego García en el Mar Indico y Kwajalein en
el Océano Pacífico Norte. Estas estaciones están equipadas con
relojes de Cesio y receptores del código P que constantemente
monitorean todos los satélites sobre el horizonte. Estas
estaciones son usadas para la determinación de las efemérides
transmitidas y modelados de reloj. Las correcciones a las
órbitas y relojes son retroalimentadas a los satélites
mediante las estaciones de control terrestres. |

|
|
GPS 12 CX
(de
mano)/Garmin |
Estas estaciones se encuentran en Ascensión,
Diego García y Kwajalein (Hoffman-Wellenhof, Lichtenegger y Collins,
1993).
SEGMENTO DEL USUARIO:
Este segmento se refiere a los distintos tipos de
receptores que existen en el mercado y de los distintos usuarios del
sistema. Con el paso del tiempo nuevas aplicaciones se han
encontrado al sistema. Se necesita, por lo tanto, diseñar y
desarrollar equipos con ciertas características para adaptarse a las
distintas necesidades de los usuarios.
TIPOS DE RECEPTORES:
El tipo de receptor a usar dependerá del tipo de
observaciones y de la disponibilidad de códigos. Los receptores GPS
pueden ser clasificados de acuerdo a sus características de la
siguiente manera (Seeber, 1993):
Código C/A
Código C/A + fase portadora
L1
Código C/A + fase portadora L1 + fase portadora L2
Código
C/A + código P + fases portadoras L1, L2
Otra clasificación de los receptores es por el tipo
de usuarios (Seeber, 1993):
Receptores militares
Receptores
civiles
Receptores para navegación
Receptores
geodésicos.
Principio de funcionamiento
El sistema NAVSTAR-GPS se basa en la medida
simultánea de la distancia entre el receptor y al menos 4
satélites.
|
|
El sistema ofrece las
siguientes informaciones:
|
Las distancias entre el receptor y el satélite se
obtienen por medio del retardo temporal entre que el satélite envia
la señal hasta que el receptor la recibe.
Veremos más adelante como se emplea la técnica de
la medida de los retardos temporales:
 Los satélites emiten
dos portadoras a la misma frecuencia. Estas portadoras están
moduladas en fase (BPSK) por diferentes códigos
pseudoaleatorios. Los satélites emiten
dos portadoras a la misma frecuencia. Estas portadoras están
moduladas en fase (BPSK) por diferentes códigos
pseudoaleatorios.
El receptor GPS calcula la correlación entre el
código recibido y el código del satélite cuya señal pretende
detectar, de esta forma:
Técnica
basada en la medida de los
retardos temporales
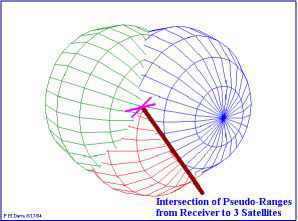
En principio
podríamos pensar que calculando los retardos temporales entre 3
satélites y el usuario ya tendríamos la posición deseada
(Xi,Yi,Zi), puesto que tres
esferoides que se cortan definen un punto. ¿Por qué son necesarios
entonces 4 satélites si parece que basta con 3 para obtener la
posición?.
La respuesta a esta pregunta es que, efectivamente,
bastaría con sólo 3 satélites para determinar la posición. Pero esto
exige una precisión muy buena y una gran estabilidad de los relojes,
tanto del satélite como del receptor. Si bien los satélites cumplen
estas dos condiciones, pues incorporan un reloj atómico (que son muy
precisos y muy estables), este no es el caso de los receptores
puesto que su precio sería desorbitado.
La solución a este problema es introducir una nueva
incógnita en el sistema (además de las tres coordenadas espaciales
del receptor) debido a la deriva que existe entre el reloj del
satélite y el reloj del usuario. Y es por esto por lo que
necesitamos 4 satélites como mínimo, y no 3 como parecía en un
principio.
Como se acaba de decir, se emplean 4 satélites
respecto a los cuales el receptor calcula las distancias
respectivas. En realidad no se miden distancias, sino
pseudodistancias. Veamos que significa este
concepto:
LLamamos:
[0] 
entonces:
[1]  -------------- distancia real (sin deriva) -------------- distancia real (sin deriva)
[2]  -------------- pseudodistancia -------------- pseudodistancia
donde el tiempo medido
es:
[3] 
[4] 
Este es el error producido como consecuencia de la
deriva existente entre el reloj del satélite y el reloj del
receptor.
Así pues, la distancia real (que es la que
realmente nos interesa) será:
[5] 
Las coordenadas de cada satélite son conocidas, tenemos
4 ecuaciones de la forma:
[6]  para i =
1,..,4 para i =
1,..,4
(xi,yi,zi) ------------
coordenadas del satélite
4 ecuaciones ~ 4 incógnitas --- solución
única
Para linealizar [6] y facilitar así su resolución
se pide al usuario que introduzca una posición aproximada:
[7]
Desarrollamos en serie de Taylor en torno a este
punto:
[8]
[9]
Que puede ponerse como:
[10]
Y así hemos llegado a un sistema con 4 ecuaciones y 4
incógnitas que se van a calcular conociendo las distancias a 4
satélites.
Si hay más de 4 satélites visibles se calculan las
pseudodistancias respecto a todos los satélites visibles, obteniendo
así un sistema con más ecuaciones que incógnitas, lo que simplifica
el cálculo de la posición.
El sistema está diseñado para que
sobre cualquier punto de la superficie terrestre haya al menos 4
satelites visibles.
El sistema GPS además de la posición nos
ofrece una referencia temporal muy exacta, esto permite:
-
Sincronizar los relojes locales (esto tiene
muchas aplicaciones, p.ej. sincronización en transmisiones ...).
-
Posibilidad de medir la velocidad a la que se
desplaza el usuario a través del desplazamiento
Doppler.
[11] ---- relación fDoppler ~
desplazamiento Doppler ---- relación fDoppler ~
desplazamiento Doppler
Algunos detalles del sistema GPS:
-
Error instrumental del cálculo de
pseudodistancias como consecuencia de un error en la medida del
retardo temporal de la señal.
[12] ---- relación fDoppler ~
desplazamiento Doppler ---- relación fDoppler ~
desplazamiento Doppler
El sistema GPS requiere sistemas de
medidas de retardo muy precisos.
-
El reloj del satélite también puede sufrir alguna
deriva (al cabo de varios años). El GPS envía al receptor una
serie de modelos para corregir estas derivas.
-
Puede suceder que el receptor sólo sea capaz de
recibir las señales de 3 satélites. En este caso se pide al
usuario que introduzca la altura y se emplea el GPS en 2D.
-
La señal tarda unas centésimas de segundo en
llegar al receptor, la posición del satélite que hay que
considerar para calcular la posición del usuario es la que tenía
el satélite en el momento de transmitir la
señal.
Estructuras de las señales transmitidas
Códigos pseudoaleatorios
Estos códigos están formados por una serie impar de
n bits con una duración de T segundos.
a0,a1,a2,...,an-1
con ai=±1
Su espectro es similar al ruido (tienen
componentes frecuenciales en todo el rango de frecuencias).
Se
caracterizan porque la función de autocorrelación:
[13]
La correlacion cruzada:
[14]

Cada uno de estos códigos pseudoaleatorios se
asigna a cada uno de los satélites. El receptor, para separar la
señal de un satélite del resto, correla las series recibidas con el
código que desea detectar.
|
El código que se quiere detectar superará un
determinado umbral: |
|
Es muy importante que el receptor y el satélite
estén sincronizados para que la correlación comience cuando llega la
señal procedente del satélite. De esta forma calcularemos el
retardo. A continuación vemos unas figuras que representan
diferentes instantes de la correlación entre dos códigos:
Los códigos deben tener una buena función de
autocorrelación:
estas características las cumplen los códigos
GOLD:
Como se ve en la figura los códigos GOLD se forman
a partir de 2 registros de desplazamiento de N etapas. Se suman las
salidas de ambos registros de desplazamiento y de esta forma
obtenemos un código GOLD de 2N-1 bits.
El sistema NAVSTAR-GPS emplea dos tipos de códigos,
a saber:
Veamos cuales son las características de estos dos
códigos.
Código C/A
Para obtenerlo se multiplica la salida de dos
códigos de 1023 bits.
La frecuencia de reloj que se emplea es de
1.023 MHz
[15]
donde,
n es el identificativo de cada satélite
T es el
tiempo de duración de 1 bit (10-6/1.023 s)
El tiempo de duración del código es:
[16]
Hay varios códigos transmitiéndose simultáneamente, se
habla de una distancia máxima no ambigua que se refiere a la
distancia recorrida por la señal en el tiempo de duración del código
[17]
La distancia equivalente a la duración de un bit
es,
[18]
Código P
Para obtenerlo se multiplica la salida de dos
códigos (P1,P2)
La frecuencia de reloj que
se emplea es de 10.23 MHz
La longitud de los dos códigos que se
multiplican para obtener el código P es de:
P1: 15345000 bits
P2:
15345034 bits
[19]
donde,
n es el identificativo de cada satélite
T es el
tiempo de duración de 1 bit (10-6/10.23 s)
El periodo de estos códigos es de 267 días, aunque
únicamente se emplean 7 días y al cabo de la semana se resetea este
código, asignando secuencias semanales distintas a cada
satélite.
Así, en este caso no hay ningún tipo de
ambiguedad. El receptor únicamente correla una determinada parte
del código.
Otro parámetro importante es la distancia asociada a
la duración de 1 bit:
[20]
La precisión en la medida del retardo está asociada con
el tiempo duración de 1 bit. Si se ha estimado que la precisión
medida del retardo es de 1% aproximadamente, entonces el error
instrumental en el cálculo de las pseudodistancias es:
Códigos C/A: 3m
Códigos P: 0.3m
Cada satélite emite dos frecuencias portadoras
coherentes entre si,
f1=10.23*154=1575.42 MHz
f2=10.23*120=1227.6 MHz
Estas portadoras estarán moduladas en fase por los
códigos pseudoaleatorios que hemos visto anteriormente, su
estructura es la siguiente:
[21]
[22]
donde,
D(t) es el mensaje de
navegación
An,Pn son los códigos C/A y P
respectivamente que hemos visto
Técnica de espectro ensanchado
El fundamento de esta técnica consiste en que la
señal transmitida se expande sobre un ancho de banda mayor mediante
una modulación extra.
-
La señal que queremos transmitir se modulará con
otra señal con un régimen binario mucho mayor.
-
Esta técnica es muy robusta frente a las interferencias (característica muy importante en sistemas
militares).
Los diagramas de bloques del transmisor y del
receptor se muestran a continuación:
Transmisor (Satélite)
Receptor (usuario)
Ejemplo
Mensaje de navegación (NAV DATA)
El mensaje de navegación está constituido por los
siguientes elementos:
-
Efemérides (son los parámetros orbitales del
satélite).
-
Información del tiempo (horario) y estado del
reloj del satélite.
-
Modelo para corregir los errores del reloj del
satélite.
-
Modelo para corregir los errores producidos por
la propagación en la ionosfera y la troposfera.
-
Información sobre el estado de salud del
satélite.
-
Almanaque, que consiste en información de los
parámetros orbitales (constelación de satélites).
Se transmite a un régimen binario de 50 bps y se
tarda 12.5 min en enviarlo completamente.
Su estructura se muestra a continuación:
Diagrama de bloques del generador de la señal
GPS
Las señales que transmite el sistema GPS tienen la
estructura siguiente:
[21]
[22]
Como ya hemos visto, cada satélite emite dos
frecuencias portadoras coherentes entre si,
-
f1=10.23*154=1575.42 MHz
-
f2=10.23*120=1227.6 MHz
Tratamiento de la señal GPS
Proceso de adquisición
Al encender el receptor GPS éste puede encontrarse
en dos estados distintos:
-
Perdido (el almanaque tiene una fecha muy
antigua)
El aparato prueba con distintos satélites hasta que
reciba una señal con una SNR aceptable. Cuando logra engancharse
con un satélite demodula el mensaje de navegación y consigue así
el almanaque y la referencia temporal GPS.
Esta fase de prueba
y error puede durar hasta unas decenas de minutos.
-
Memorizado (hace poco que hemos usado el
aparato GPS y el almanaque almacenado sirve para saber la posición
de todos los satélites)
El aparato se engancha con los cuatro
satélites que tiene visibles.
Cuando el receptor ya está enganchado con un
satélite se asigna el canal/es a los códigos de los satélites que
están visibles y se inicia el proceso de enganche con cada satélite.
Proceso de seguimiento
Cuando nos hemos sincronizado con dada uno de los
satélites, tras realizar la correlación detectamos los picos que
superan un determinado umbral y a partir de ellos obtenemos el
retardo temporal y con esto la ecuación de un esferoide donde está
el usuario. Repitiendo este proceso para 4 satélites obtenemos la
posición del usuario.
También hay un lazo de seguimiento a la portadora.
Este tiene como misión estar continuamente enganchados a las
portadoras que emite el satélite.
Veamos estos dos lazos
mediante un diagrama de bloques:
Configuración
del sistema
En este capítulo veremos las partes que forman el
sistema NAVSTAR-GPS. Estas son tres, a saber:
Segmento espacial
Constelación GPS
-
Al principio se pensó que sólo eran necesarios 18
satélites (más 3 de emergencia por si alguno fallaba). Sin
embargo más tarde se comprobó que con este número la cobertura en
algunos puntos de la superficie terrestre no era buena.
-
Así pues se pasaron a utilizar 21 satélites (más
3 de reserva como antes) repartidos en 6 órbitas, de forma que hay
4 satélites por órbita.
-
El sistema está diseñado de tal forma que sobre
cualquier punto de la superficie terrestre se ven al menos 4
satélites.
Órbitas
-
Las órbitas de los satélites son casi circulares,
con una excentricidad de 0.03 a 0.3
-
Están situadas a una altura de 20180 km.
-
Tienen una inclinación respecto al plano del
ecuador de 55º.
-
La separación entre las órbitas es de 60º.
-
El periodo de los satélites es de 11h 58m.
-
Hay 6 efemérides que caracterizan a las órbitas.
Satélites del sistema NAVSTAR_GPS  
Emiten con una potencia de 700W
La antena:
Es un array
helicoidal
Su
ganancia es de 15dB.
Incorporan un reloj atómico muy estable y
preciso.
Su vida media es de aproximadamente 7.5 años, al cabo de
este tiempo hay que sustituirlo.
Segmento de control
Existe una estación maestra de control (sita en
Colorado Spring)
- Esta se encarga de calcular las efemérides de cada uno de los
satélites.
Hay 3 estaciones de carga
-
Están situadas en Diego García, Isla Ascensión,
Kwajalein
-
Transmiten satos (mensaje de navegación) y
reciben las señales que los satélites envían a estas estaciones.
-
Se emplea la banda S
Además hay 5 estaciones monitoras
-
Se encuentran en Hawaii y Colorado Spring.
-
Controlan el estado y posición de los satélites.
-
Reciben las señales transmitidas por los
satélites y a partir de ellas obtienen información para poder
calcular las efemérides de los satélites. Esta información es
transmitida a la estación maestra de control que es la encargada de
calcular las efemérides y obtener así la posición de los satélites
con una posición muy buena.
Segmento de los usuarios
Está formado por los receptores GPS.
Sus
funciones principales son las siguientes:
-
Sintonizar las señales emitidas por los satélites
-
Decodificar el mensaje de navegación
-
Medir el retardo de la señal (desde el transmisor
hasta el receptor) a partir de los cuales calculan la posición.
-
Presentar la información de la posición en la que
se encuentra (en 3D ó en 2D)
Otras funciones complementarias son
Prestaciones de los receptores civiles (c/A)
-
1ª posición 2D en menos de 2 minutos (siempre que
no partamos de la posición perdido).
-
1ª posición 3D en menos de 2.5 minutos (siempre
que no partamos de la posición perdido).
-
Actualizaciones de la posición de 0.5 a 1
segundos.
-
Precisión en torno a 15m.
-
Medida de la velocidad del usuario, precisión de
0.1m/s aproximadamente.
-
Referencia temporal, precisión de 100ns
aproximadamente.
Estructura general del equipo de usuario:
-
Antena:
LNA, para no degradar la sensibilidad
-
Receptor:
Traslada la señal a frecuencia
intermedia.
Demodula y decodifica el mensaje de
navegación
-
Microprocesador:
Calcula la
posición.
Controla todos los procesos que debe realizar el
receptor.
-
Unidad de Control:
Permite la comunicación
entre el usuario y el microprocesador, por ejemplo para eleguir el
tipo de presentación, introducir la posición inicial aproximada
...
-
Almacenamiento de datos:
Rutas, posiciones...
-
Presentación
-
Teclado...
Tipos de receptores GPS
Receptor secuencial
Este tipo de receptor sólo cuenta con un
canal.
Sigue secuencialmente a los diferentes satélites
visibles.
El receptor permanece sincronizado con cada uno de los
satélites al menos 1 segundo. Durante este tiempo adquiere la señal
y calcula el retardo temporal.
Extrae el retardo de sólo 4
satélites y a partir de estos calcula la posición. Los satélites que
elige son aquellos que tienen mejor SNR.
Estos receptores son:
-
Los más baratos.
-
Los más lentos.
-
Su precisión es menor que la de los otros tipos
de receptores.
-
Suele emplearse en aplicaciones de baja dinámica
(barcos, navegación terrestre ...)
Receptor continuo o multicanal
En este caso estos receptores disponen de al menos
4 canales.
A cada canal se le asigna el código de 1 satélite para
que se sincronice con él y adquiera el retardo con ese
satélite.
Se miden los retardos simultáneamente.
Son más
rápidos que los secuenciales a la hora de calcular la
posición.
Su precisión también es mejor que en el modelo
anterior.
Están recomendados para aplicaciones de gran dinámica
(aeronaves).
Receptor con canales multiplexados
Tenemos 1 único canal físico (hardware).
Tenemos
4 o más bucles de seguimiento (software).
De este modo se deben
muestrear todos los satélites visibles en un tiempo inferior a 20
ms, pues así podremos obtener la información recibida de todos los
satélites visibles (Tbit=20ms).
La complejidad
software es mayor y necesitamos un microprocesador más potente. Pero
tiene la ventaja respecto al receptor continuo de que al emplear 1
sólo canal físico será menos sensible a las posibles variaciones de
canal que en el caso de los receptores continuos (los canales no
pueden ser exactamente iguales, unos tendrán un retardo distinto al
resto...).
Fuentes de
error
Introducción
El error del NAVSTAR-GPS se expresa como el
producto de dos magnitudes, a saber:
-
UERE: es el error equivalente en distancia al
usuario, se define como un vector sobre la línea vista entre el
satélite y el usuario resultado de proyectar sobre ella todos los
errores del sistema.
-
DOP (Dilution Of Precision): depende de la
geometría de los satélites en el momento del cálculo de la
posición. No es lo mismo que los 4 satélites estén muy separados
(mejor precisión) que los satélites estén más próximos (menor
precisión). El DOP se divide en varios términos:
-
GDOP (Geometric DOP), suministra una
incertidumbre como consecuencia de la posición geométrica de los
satélites y de la precisión temporal.
-
PDOP (Position DOP), incertidumbre en la
posición debido únicamente a la posición geométrica de los
satélites.
-
HDOP (Horizontal DOP), incertidumbre en la
posición horizontal que se nos da del usuario.
-
VDOP (Vertical DOP), suministra una información
sobre la incertidumbre en la posición vertical del usuario.
Las principales fuentes de error son las
siguientes:
-
Error en el cálculo de la posición del satélite.
-
Inestabilidad del reloj del satélite.
-
Propagación anormal de la señal (velocidad de
propagación no constante).
Estos errores se corrigen a través de diferentes
modelos que son transmitidos en el mensaje de navegación a los
usuarios. Veremos como es el ruido del receptor el que se convierte
en una de las principales fuentes de error del sistema.
Error en el cálculo de la posición de los
satélites
Los satélites se desvían de las órbitas calculadas
por diferentes razones, entre estas podemos citar:
-
Por la variación del campo gravitatorio.
-
Debido a variaciones en la presión de la
radiación solar.
-
Debido a la fricción del satélite con moléculas
libres.
Se ha estimado que las efemérides calculan la
posición de los satélites con una precisión de 20 metros. Para
disminuir (e incluso evitar) esta fuente de error se han construido
varios algoritmos basados en datos experimentales (empíricos). Los
coeficientes de estos algoritmos se transmiten al usuario a través
del mensaje de navegación para que se reduzca el error debido a esta
fuente de error.
Errores debidos a inestabilidades del reloj del
satélite
Los satélites emplean relojes atómicos muy
precisos, pero con el paso del tiempo pueden presentar alguna
deriva. En el mensaje de navegación uno de los parámetros que se
enviaban era el estado del reloj del satélite para tener controlado
su funcionamiento.
Debido a que el satélite está situado en un
campo gravitatorio más débil se produce un adelanto del reloj y como
consecuencia de la mayor velocidad que lleva el satélite se produce
un retraso del reloj. Sobre estos dos efectos predomina el adelanto,
por esto se diseñan para que en la superficie terrestre atrasen y al
ponerlos en órbita funcionen bien, pero no se consigue totalmente
debido a efectos relativistas. Todos los coeficientes se envían al
usuario a través del mensaje de navegación y así la corrección de
esta fuente de error es casi total.
Errores debidos a la propagación de la
señal
Hemos supuesto que la velocidad de propagación de
la señal es constante, pero esto no es cierto. Especialmente cuando
la señal se transmite por la ionosfera y la troposfera. Por tanto
las distancias medidas no son las distancias reales.
El efecto
más importante se produce en la propagación por la ionosfera, este
puede llegar a ser de hasta 100 metros. Para corregir este error
los receptores civiles (códigos C/A y 1 sola frecuencia) usan
modelos empíricos caracterizados por parámetros dependientes de la
hora, latitud, estación ... Todos estos parámetros se transmiten en
el mensaje de navegación.
Para los receptores militares (que usan
las dos frecuencias) el método para corregir este error es más
eficaz.
Disponibilidad
Selectiva
La disponibilidad selectiva fue eliminada el 1 de
Mayo del 2000.
Estuvo motivada por la excesiva precisión obtenida
por los receptores civiles, por esto se decide degradar esta
precisión. Esto se hace de dos formas:
Con esto es consigue degradar el UERE hasta 37.5
metros. Los receptores militares van a disponer de los modelos de
errores introducidos y ellos tendrán la precisión inicial del
sistema (UERE = 66.6 m).
Precisión del
sistema GPS
Se define el radio de la esfera o círculo (3D/2D)
en la que estarán el 50% de las medidas.
La precisión depende de
dos parámetros
| |
C/A (con disp select) |
P |
| 3D -- |
75.7 m |
13.5 m |
| 2D -- |
43 m |
7.7 m |
| Vertical |
49.7 m |
8.8 m |
En cuanto a la precisión en la referencia temporal
tenemos:
DGPS (GPS
diferencial)
Se construyó principalmente por la introducción de
la disponibilidad selectiva. Es un sistema a través del cual se
intenta mejorar la precisión obtenida a través del sistema
GPS.
El fundamento radica en el hecho de que los errores
producidos por el sistema GPS afectan por igual (o de forma muy
similar) a los receptores situados próximos entre si.
Si
suponemos que un receptor basándose en otros técnicas conoce muy
bien su posición, si este receptor recibe la posición dada por el
sistema GPS será capaz de estimar los errores producidos por el
sistema GPS. Si este receptor transmite la corrección de errores a
los receptores próximos a él estos podrán corregir también los
errores producidos por el sistema.
Con este sistema DGPS se pueden corregir en parte
los errores debidos a:
-
Disponibilidad selectiva.
-
Propagación por la ionosfera - troposfera.
-
Errores en la posición del satélite (efemérides).
-
Errores producidos por errores en el reloj del
satélite.
Estructura del DGPS
Una estación monitora que conoce su posición con
una precisión muy alta. Esta estación tiene:
Hay un canal de datos unidirecional hacia los receptores, por
lo tanto:
En los mensajes que se envían a los receptores
próximos se pueden incluir dos tipos de correcciones:
-
Una corrección directamente aplicada a la
posición.
Esto tiene el inconveniente de que tanto el usuario
como la estación monitora deberán emplear los mismos satélites,
pues las correcciones se basan en esos mismos satélites.
-
Una corrección aplicada a las pseudodistancias de
cada uno de los satélites visibles.
En este caso el usuario
podrá hacer la corrección con los 4 satélites de mejor SNR. Esta
corrección es más flexible.
El error producido por la disponibilidad selectiva
varía incluso más rápido que la velocidad de transmisión de los
datos. Por ello, junto con el mensaje que se envía de correcciones
también se envía el tiempo de validez de las correcciones y sus
tendencias. Por tanto el receptor deberá hacer algún tipo de
interpolación para corregir los errores producidos.
Cobertura y precisión del DGPS
Tiene una cobertura de 200 km en torno a la
estación terrena. Esta zona es donde los errores están fuertemente
correlados.
Se eliminan los errores del segmento espacial y de
control. En cuanto al segmento de lo usuarios se eliminan los
efectos de la ionosfera y troposfera y el parámetro que más afecta
es el ruido del receptor.
Se están desarrollando sistemas WADGPS
(DGPS de área amplia) que no es otra cosa que un DGPS de gran
cobertura. Está formado por varias estaciones monitoras DGPS cuyas
áreas de cobertura están superpuestas.
Aplicaciones y futuro del GPS
Algunas de las muchas aplicaciones del GPS son las
siguientes:
Aplicaciones en la navegación
Navegación marítima
|
GPSMAP 180 / Garmin
|
Su implantación ha sido muy rápida (antes las
embarcaciones empleaban el sistema TRANSIT). Se piensa que en
poco tiempo toda la navegación marítima se basará en GPS.
Actualmente también se emplean sistemas hiperbólicos, pero
estos sistemas tienden a desaparecer...
El costo del
sistema GPS es bajo (además los barcos no requieren receptores
de gran calidad) y lo puede usar cualquier
embarcación. |
Navegación terrestre
En
este caso hay dos mercados principales:
-
Automóviles,
Integran el GPS y sistemas
gráficos avanzados para proporcionar un sistema de guiado desde un
punto de una ciudad a otro evitando embotellamientos.
-
Recptores personales,
Excursiones en 4x4, como
sistema de guiado para no videntes ...
La gran penetración de este sistema se debe al bajo
costo de los receptores.
En la actualidad se emplea en
aplicaciones profesionales:
|
También estamos viendo su aparición en
pruebas deportivas como en el caso del ciclismo, donde permite
conocer en cada instante y en tiempo real el tiempo que saca
un corredor a otro, la pendiente de una rampa de un puerto,
etc.
Navegación
aérea
Debido a su mayor complejidad técnica su
proceso de instalación ha sido más lento. Se están
desarrollando sistemas GNSS que pretender mejorar los actuales
sistemas de gestión de vuelos.
Se están instalando en áreas
de bajo tráfico, ya que su uso no está justificado si tenemos
en cuenta que ya existe el RADAR. |

|
|
Raystar 120 WAAS
Receiver / Receptor GPS
Diferencial
Raytheon |
Aplicaciones militares
Como el GPS es un sistema desarrollado por el
ejército el desarrollo del GPS en este campo ha sido más rápido que
en las aplicaciones civiles.
Se emplea en la navegación militar
(aeronaves, vehículos terrestres, barcos, etc.).
Una de las
aplicaciones es,
Constituye una revolución para los sistemas
militares, se usa para el posicionamiento de las tropas, etc.
Ciencias geográficas
Permite situar puntos con gran precisión.
Se
pueden construir mapas geográficos mucho más precisos, mejorando los
que había hasta ahora.
|

|
Otras aplicaciones
Sincronización, pues el GPS ofrece una referencia
temporal muy exacta. Lo usan algunos sistemas de transmisión.
Para conseguir la referencia temporal sólo se
necesita un satélite.
Defensa civil, para la
localización y delimitación de zonas afectadas por grandes
catástrofes y guiado de vehículos de auxilio.
El GPS está
causando un gran impacto tanto en aspectos tecnológicos como
económicos. |
|
Raynav 300 GPS
Ploter /
Raytheon |
Limitaciones
La más importante es la dependencia de un único
país EE.UU.
Concretamente del DoD (Departamento de Defensa). Cuando
ellos quieran pueden eliminar el uso civil del
sistema.
Actualmente hay dificultad en su uso en ciudades con
edificios altos.
También es difícil garantizar su integridad,
pues en caso de guerra se podría lanzar misiles para eliminar algún
satélite.
|