Il controller DDM_Rotor qui presentato � adatto ad interfacciare diversi modelli di rotori d'antenna AZIMUTALI.
Requisito essenziale � che il rotore disponga di un potenziometro per la rilevazione dell'azimut, da cui si possa
ricavare una tensione corrispondente alla posizione angolare corrente.
Il controller non � adatto a gestire rotori ZENITALI.
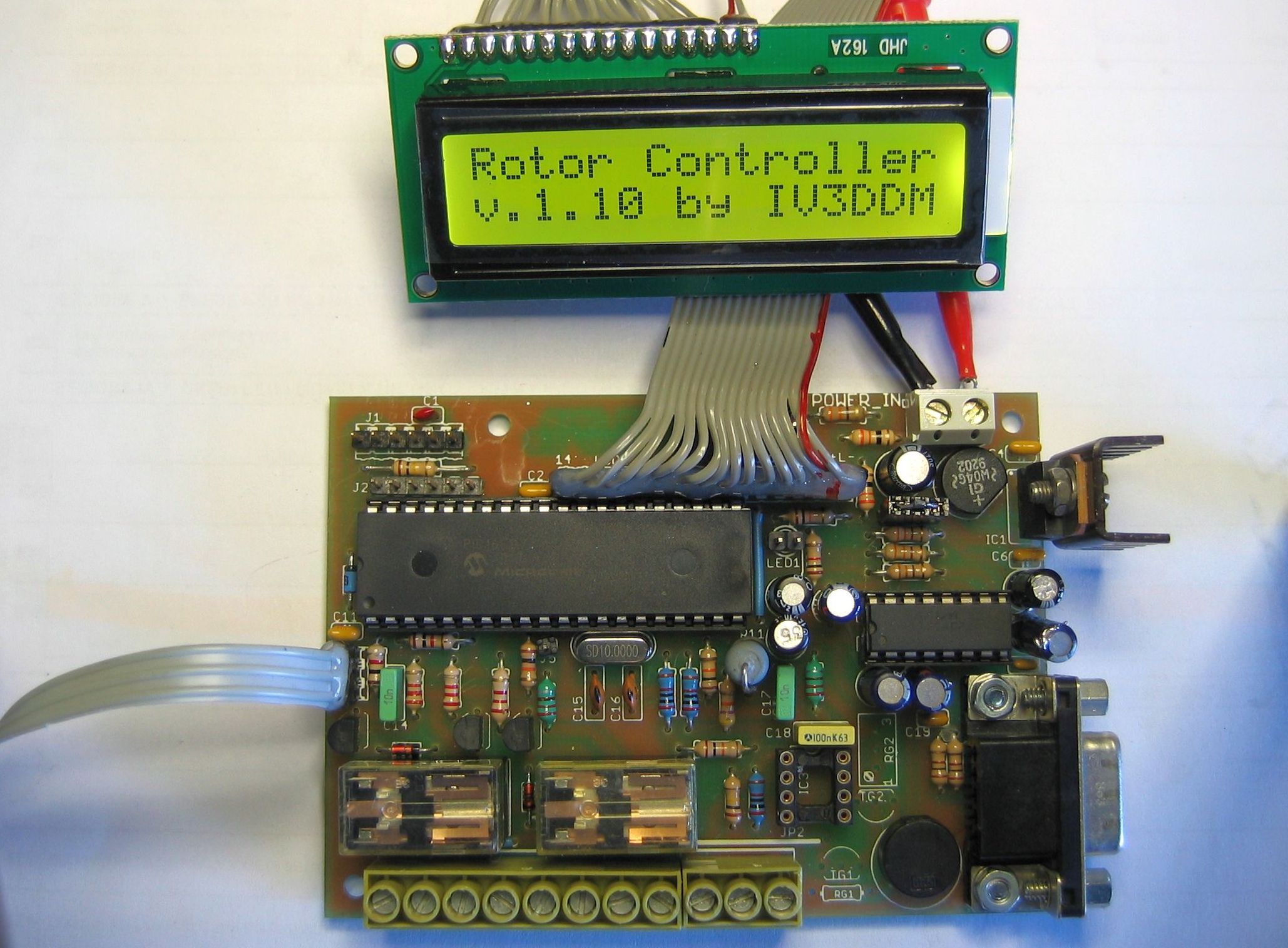
Se completato con il circuito di alimentazione per il rotore, pu� essere utilizzato in sostituzione del
Control Box originale, come nel caso di questo prototipo usato con un rotore Yaesu G-400:

Controller completo di stadio di alimentazione per rotore Yaesu G-400
Disponendo di un Control Box predisposto per essere collegato ad un controller remoto esterno, che
fornisca una tensione tra 0 e 5 volt per la rilevazione dell'azimut, DDM_Rotor pu�
essere aggiunto all'interno dello stesso, perch� pu� funzionare anche senza display LCD e pulsanti.
Oppure pu� essere usato come nell'esempio della foto seguente, dove � stato installato
esternamente ad uno Yaesu G-800SDX per usufruire anche di tutte le sue caratteristiche aggiuntive.

DDM_Rotor collegato al Control Box di uno Yaesu G-800SDX

Connettore aggiunto al Control Box G-800SDX con i contatti presenti nel connettore interno ad 8 pin

Vista del Controller digitale all'interno del suo contenitore
Le principali caratteristiche del circuito sono:
- Gestione Azimut con range settabile da un minimo di 360� ad un massimo di 500�
- Impostazione dell'azimut tramite pulsanti, potenziometro di Preset o PC via porta RS232 (anche USB usando un convertitore esterno, oppure
implementando la modifica proposta da Clive GW0PPO, consultabile nella sezione Foto Gallery )
- Display LCD opzionale
- Possibilit� di riposizionamento automatico del rotore se il puntamento dovesse cambiare per cause esterne
- Stop automatico del motore se non viene rilevato movimento del rotore
- Predisposizione per la regolazione automatica della velocit� del rotore
- Pu� gestire rotori installati con Stop Point (fermo corsa) a NORD, a SUD, o qualsiasi altra posizione
- Possibilit� di visualizzare sul display LCD il puntamento di una antenna secondaria con diverso orientamento
rispetto a quella principale
- Gestione del percoso pi� breve su sistemi con angolo di rotazione superiore a 360�
- Impostazione rapida della posizione di sicurezza antivento
- Configurazione tramite pulsanti o da PC
- Watchdog in caso di microprocessore bloccato
- Possibilit� di gestione di un eventuale freno elettromeccanico tramite rel� esterno.
VISUALIZZAZIONE SU DISPLAY LCD

Esempio di visualizzazione su LCD
Sebbene DDM_Rotor possa funzionare anche senza display LCD, il suo uso � consigliato per poter
usufruire di alcune caratteristiche aggiuntive, come ad esempio la visualizzazione dell'azimut
da raggiungere tramite i pulsanti e potenziomentro di Preset, il puntamento dell'antenna secondaria,
l'impostazione di velocit� di rotazione corrente ed i codici di stato.
Nella prima riga del display LCD vengono visualizzati:
- l'azimut attuale da 0� a 360� seguito da un asterisco se ci si trova in posizione di Overlap
- un codice di stato corrispondente all'ultimo evento:
- C: Interrogazione Azimut da PC
- J: Jam (stop automatico per rotore bloccato)
- L: Pulsante Left
- M, W: Impostazione azimut da PC
- P: Potenziometro di Preset azimut
- R: Pulsante Right
- s: Stop immediato da PC
- S: Stop immediato da pulsante
- !: Impostazione Safe Position
- ?: Errore comando rs232
- conteggio di timeout prima dello stop automatico per rotore bloccato
- simbolo � se attivata la visualizzazione dell'antenna secondaria
Nella seconda riga del display LCD vengono visualizzati:
- l'azimut richiesto da 0� a 360� seguito da un asterisco se l'azimut richiesto si trova in posizione di Overlap
- durante il movimento: da 1 a 4 simboli < o > che corrispondo a direzione ed impostazione di velocit�
corrente, oppure degli eventuali avvisi
In particolari situazioni, il controller potrebbe resettarsi visualizzando un codice di errore numerico:
- 11: E' intervenuto il Watchdog a causa del microprocessore bloccato
- 26: La tensione di alimentazione del microprocessore � scesa sotto il livello minimo consentito
Progetto originale di Giorgio Emili IV3DDM
