|
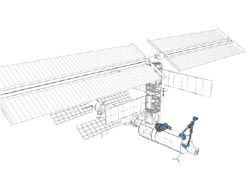
Flight 11 - 6A
- Launch Date:
- ?
- Launch Vehicle:
- US Space Shuttle: STS-100
- Elements:
- Leonardo MPLM (Lab outfitting flight), Ultra High Frequency (UHF) antenna,
and Space Station Remote Manipulating System (SSRMS)
|
- Italian-built
Multi-Purpose Logistics Module (MPLM) "Leonardo" carries
6 system racks and 2 storage racks to be installed in U.S. Lab.
- UHF antenna
provides space-to-space communications capability for US-based spacewalks.
- Delivers
Canadian SSRMS (station mechanical arm) needed to perform assly
operations on later flights.
|
|
The Italian Space Agency (ASI)-built Leonardo Multipupose Logistics Module
is the first of three such pressurized modules that will serve as the
International Space Station's "moving vans," carrying laboratory racks
filled with equipment, experiments and supplies to and from the station
aboard the Space Shuttle.
|

|
The unpiloted, reusable logistics modules function as both a cargo carrier
and a space station module when they are flown. Mounted in the Space
Shuttle's cargo bay for launch and landing, they are berthed to the station
using the Shuttle's robotic arm after the Shuttle has docked. While berthed
to the station, racks of equipment are unloaded from the module and then
old racks and equipment may be reloaded to be taken back to Earth. The
logistics module is then detached from the station and positioned back into
the Shuttle's cargo bay for the trip home. When in the cargo bay, the cargo
module is independent of the Shuttle cabin, and there is no p./img/assageway for
Shuttle crewmembers to travel from the Shuttle cabin to the module.
In order to function as an attached station module as well as a cargo
transport, the logistics modules also include components that provide some
life support, fire detection and suppression, electrical distribution and
computer functions. Eventually, the modules also will carry refrigerator
freezers for transporting experiment samples and food to and from the
station. Although built in Italy, the logistics modules, technically known
as Multipurpose Logistics Modules (MPLMs), are owned by the U.S. and
provided in exchange for Italian access to U.S. research time on the
station.
The Leonardo module will be launched on Shuttle mission STS-100 in December
1999 on a mission that also will carry aloft the Canadian-built station
robotic arm. On that flight, Leonardo will be filled with equipment and
supplies to outfit the U.S. laboratory module, which will have been carried
to the station on a preceding Shuttle flight.
Construction of ASI's Leonardo module began in April 1996 at the Alenia
Aerospazio factory in Turin, Italy. Leonardo was delivered to Kennedy from
Italy in August 1998 by a special Beluga cargo aircraft. The cylindrical
module is approximately 21 feet long and 15 feet in diameter, weighing
almost 4.5 tons. It can carry up to 10 tons of cargo packed into 16
standard space station equipment racks. Of the 16 racks the module can
carry, five can be furnished with power, data and fluid to support a
refrigerator freezer. Construction of the second module, named Raffaello,
already has begun and it is scheduled to arrive at Kennedy in 1999. The
third module, named Donnatello, is scheduled for delivery to Florida in
2000.
The Italian Space Agency chose the names of the modules because they denote
some of the great talents in Italian history: Leonardo da Vinci, an
extraordinary inventor-scientist, civil engineer, architect, military
planner and weapons designer, and artist; Donato di Niccolo di Betto Bardi,
one of the greatest sculptors of all time and one of the founders of modern
sculpture; and Raffaello Sanzio, an artist whose work stands alone for its
visual achievement of human grandeur, both in clarity of form and ease of
composition.
SSRMS
|
Canada is contributing an essential component of the International Space
Station, the Mobile Servicing System, or MSS. This robotic system will play
a key role in Space Station assly and maintenance, moving equipment and
supplies around the Station, releasing and capturing satellites, supporting
astronauts working in space, and servicing instruments and other payloads
attached to the Space Station. Astronauts will receive robotics training to
enable them to perform these functions with the arm.
|

|
The Mobile Servicing System comprises three parts:
Space Station Remote Manipulator System (SSRMS)
The next generation Canadarm is a bigger, better, smarter version of the
space shuttle's robotic arm. It is 17 meters long when fully extended and
has seven motorized joints. This arm is capable of handling large payloads
and ./img/assisting with docking the space shuttle. The SSRMS is self-relocatable
with a Latching End Effector, so it can be attached to complementary ports
spread throughout the Station's exterior surfaces.
Mobile Base System (MBS)
A work platform that moves along rails covering the length of the Space
Station, the MBS will provide lateral mobility for the Canadarm as it
traverses the main trusses.
Special Purpose Dexterous Manipulator (SPDM)
The SPDM, or Canada Hand, is a smaller two-armed robot capable of handling
the delicate assly tasks currently handled by astronauts during
spacewalks.
Launches:
The Mobile Servicing System will be delivered and installed on the Space
Station in pieces: the arm on assly flight 6A in 1999; the base on UF-2
in 2000; the hand on UF-4 in 2002.